the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 25 Mar 2024
| 25 Mar 2024
Model-based evaluation of cloud geometry and droplet size retrievals from two-dimensional polarized measurements of specMACS
Lea Volkmer
Veronika Pörtge
Fabian Jakub
Bernhard Mayer
Cloud radiative properties play a significant role in radiation and energy budgets and are influenced by both the cloud top height and the particle size distribution. Both cloud top heights and particle size distributions can be derived from 2-D intensity and polarization measurements by the airborne spectrometer of the Munich Aerosol Cloud Scanner (specMACS). The cloud top heights are determined using a stereographic method (Kölling et al., 2019), and the particle size distributions are derived in terms of the cloud effective radius and the effective variance from multidirectional polarized measurements of the cloudbow (Pörtge et al., 2023). In this study, the accuracy of the two methods is evaluated using realistic 3-D radiative transfer simulations of specMACS measurements of a synthetic field of shallow cumulus clouds, and possible error sources are determined. The simulations are performed with the 3-D Monte Carlo radiative transport model MYSTIC (Mayer, 2009) using cloud data from highly resolved large-eddy simulations (LESs). Both retrieval methods are applied to the simulated data and compared to the respective properties of the underlying cloud field from the LESs. Moreover, the influence of the cloud development on both methods is evaluated by applying the algorithms to idealized simulated data where the clouds did not change during the simulated overflight of 1 min over the cloud field. For the cloud top height retrieval, an absolute mean difference of less than 70 m with a standard deviation of about 130 m compared to the expected heights from the model is found. The elimination of the cloud development as a possible error source results in mean differences of (46±140) m. For the effective radius, an absolute average difference of about µm from the expected effective radius from the LES model input is derived for the realistic simulation and µm for the simulation without cloud development. The difference between the effective variance derived from the cloudbow retrieval and the expected effective variance is (0.02±0.05) for both simulations. Additional studies concerning the correlations between larger errors in the effective radius or variance and the optical thickness of the observed clouds have revealed that low values in the optical thickness do not have an impact on the accuracy of the retrieval.
- Article
(7349 KB) - Full-text XML
- BibTeX
- EndNote





On average, clouds cover about 67 % of the Earth's surface (King et al., 2013) and therefore largely impact the global radiation and energy budgets determining our climate. With regard to the Earth's energy budget, clouds have both a cooling and a warming effect. On the one hand, the cooling effect originates from the reflection of the incoming shortwave radiation from the sun back to space, which is determined by the optical properties of the clouds. These optical properties depend on the phase of the cloud (pure liquid, ice or mixed phase) and the shape and size of its particles. On the other hand, clouds absorb longwave radiation originating from the Earth's surface while emitting at lower temperatures, which results in a greenhouse effect in the atmosphere. Since temperature decreases with height in the Earth's troposphere, the greenhouse effect increases with cloud top height. Therefore, exact knowledge of the cloud top height is important to determine the impact of clouds on the longwave radiation budget of the Earth.
As clouds form almost anywhere around the globe and appear in a large variety of cloud types (from optically thick cumulonimbus to thin cirrus clouds), their exact characterization is important to resolve their impact both on our daily weather and on the long-term climate. But resolving clouds in numerical weather prediction and climate models is limited due to their high spatial and temporal variability, requiring high computational costs. Thus, most models rely on cloud parametrizations, which are often based on measurement studies, making the observational characterization of clouds important (e.g., Martin et al., 1994; Seifert and Beheng, 2001, 2006).
In recent decades, much effort has been made to better understand clouds and their feedback mechanisms to climate change, both from the modeling and the observational sides. In particular, a reduction in the uncertainty of the global cloud feedback has been accomplished, which is now likely expected to be positive with high confidence, as indicated by the most recent IPCC report (Forster et al., 2021). This was achieved by evaluating the regional feedbacks of clouds separately. For this, extensively studying the interaction between clouds, circulation and climate is indispensable (Bony et al., 2015). Airborne field campaigns, such as the Next-Generation Aircraft Remote Sensing for Validation (NARVAL I and II; Stevens et al., 2019) and the Elucidating the role of clouds–circulation coupling in climate (EUREC4A) field campaigns (Bony et al., 2017), took place in the vicinity of Barbados to classify the macro- and microphysical properties of trade-wind cumuli. Other campaigns, such as the Arctic Cloud Observations Using Airborne Measurements during Polar Day (ACLOUD); the Physical Feedbacks of Arctic Boundary Layer, Sea Ice, Cloud and Aerosol (PASCAL) (both described in Wendisch et al., 2019); and the recent Arctic Air Mass Transformations During Warm Air Intrusions and Marine Cold Air Outbreaks (HALO-(AC)3) campaign, were conducted for the characterization of clouds in the Arctic and their role in the Arctic Amplification. During the NARVAL expeditions, EUREC4A and HALO-(AC)3, the German High Altitude and LOng range research aircraft (HALO; Krautstrunk and Giez, 2012) was operated as a cloud observatory (Stevens et al., 2019). On board HALO, the spectrometer of the Munich Aerosol Cloud Scanner (specMACS; Ewald et al., 2016) provides wide-field and spatially highly resolved radiance measurements from which both cloud top heights and cloud optical properties can be obtained. The instrument originally consisted of two hyperspectral line cameras covering the wavelength range between 400 and 2500 nm (Ewald et al., 2016) but has been extended by two polarization-resolving RGB cameras (Phoenix 5.0 MP polarization model) prior to the EUREC4A campaign (Pörtge et al., 2023). The wide combined field of view of about 90°×120° of the two cameras allows for deriving cloud top heights and cloud droplet size distributions for a large area from spatially highly resolved intensity measurements at resolutions of 10–20 m at usual flight altitudes of 10 km (Pörtge et al., 2023). Moreover, the cameras provide simultaneous measurements at a frame rate of 8 Hz, resulting in a high temporal resolution. With the intensity measurements of the two RGB cameras, the cloud top heights are derived using a stereographic reconstruction method of the cloud geometry described by Kölling et al. (2019) for data of the 2-D RGB camera installed prior to the EUREC4A campaign. To summarize, the algorithm relies on the identification of points on the cloud surface using contrast gradients. The reidentification of detected points in subsequent images and the associated observation from different perspectives enable localization in 3-D space. The polarization measurements allow us to determine cloud droplet size distributions in terms of the effective radii and effective variances of liquid water clouds derived from observations of the cloudbow (Pörtge et al., 2023). Hereby, the dependency of the polarized scattering phase function of water clouds in the scattering angle that ranges between 135 and 165°, the region of the cloudbow, on the size distribution of the cloud droplets is used to determine the effective radius and variance of the observed cloud targets. The cloud targets are defined as clusters of 10×10 cloudy pixels and thus have an approximate size of 100 m × 100 m depending on the actual distance to the cloud. The cloud targets are observed from multiple viewing angles in subsequent images while flying over the clouds. The retrieval is described in Pörtge et al. (2023) and consists of three steps which are shortly summarized in the following. First, possible cloud targets which are observed in the cloudbow region are identified. Then, the identified cloud targets are located in 3-D space using the corresponding cloud top heights from the stereographic reconstruction algorithm. Hence, an accurate determination of the cloud top heights is important as small errors in the cloud top height will lead to large localization errors in the cloud targets in subsequent images. In the case of inaccurate cloud top height data, the cloudbow signal will be wrongly aggregated, which in turn leads to errors in the derived cloud droplet size distribution. This further motivates the accuracy assessment of the cloud top height retrieval performed in this paper. Finally, pre-calculated polarized scattering phase functions from Mie theory are fitted against the polarized radiance measurements, and the best fit determines the effective radius and variance of the cloud target.
Similar techniques have been successfully applied to several space- and airborne instruments, such as the Polarization and Directionality of the Earth's Reflectances (POLDER; Deschamps et al., 1994; Bréon and Goloub, 1998; Bréon and Doutriaux-Boucher, 2005; Shang et al., 2015), the Research Scanning Polarimeter (RSP; Cairns et al., 1999; Alexandrov et al., 2012a), the Airborne Hyper-Angular Rainbow Polarimeter (AirHARP; Martins et al., 2018; McBride et al., 2020), and the Airborne Multiangle SpectroPolarimetric Imager (AirMSPI; Diner et al., 2013; Xu et al., 2018).
As both cloud top heights and cloud optical properties determine the radiative properties of clouds and their feedback with regard to climate change, it is important to accurately measure those properties. In this study, the benefits of realistic 3-D radiative transfer simulations generated with the Monte Carlo code for the physically correct tracing of photons in cloudy atmospheres (MYSTIC; Mayer, 2009) are exploited to evaluate the retrieval results and determine their accuracies. To do so, the usage of simulations is important as they rely on fully self-consistent cloud and radiation fields, while, for example, comparisons to other instruments always depend on the different sensitivities. Moreover, it is often hard to find suitable measurements, and even for large measurement campaigns such as EUREC4A with coordinated flights of remote sensing and in situ aircraft, simultaneous measurements of the same cloud and, in particular, its cloud top are rare. Furthermore, model simulations allow for separating the different error sources since one has control over all model variables. For example, the investigation of the influence of the cloud development during the aircraft overpass is possible by assuming either a realistically evolving or a temporally constant cloud field.
The benefits of radiative transfer simulations for the accuracy assessment of cloud droplet size retrievals have also been used by Alexandrov et al. (2012a), who performed various tests on simplified 1-D and realistic 3-D radiative transfer simulations of polarized reflectance measurements of the RSP instrument. For example, it was studied how aerosol layers of different optical thicknesses above the cloud layer and the presence of multiple cloud layers affect the RSP retrieval. Although the retrieval algorithms for RSP and specMACS are based on the same principals, namely multi-angle observations of the cloudbow and the fit of the polarized phase functions to the observations, the retrievals differ from each other because of the different properties of the instruments: while RSP is an along-track scanning instrument with defined viewing angles and nine spectral channels (Cairns et al., 1999), the polarization cameras of specMACS measure 2-D images (Weber et al., 2024), which allows for the retrieval of the cloud droplet size distribution for broader parts of the clouds. However, this comes at the cost of broader spectral response functions, which might influence the accuracy of the polarimetric cloud droplet size distribution retrieval, and will be tested with this work. In contrast to Alexandrov et al. (2012a), who mainly used the 865 nm wavelength for the simulations, we applied the full spectral response functions of the cameras with central wavelengths (bandwidths) of approximately 620 nm (66 nm), 546 nm (117 nm) and 468 nm (82 nm) (Pörtge et al., 2023). Further, the whole retrieval procedure, including the identification of possible cloud targets and the geolocalization based on the stereographic cloud top heights, will be tested.
The polarimetric cloudbow retrieval was further studied in Miller et al. (2018). In this work, large-eddy simulations (LESs) are used in combination with 1-D radiative transfer simulations for the comparison of cloud droplet size distributions derived from the bispectral Moderate Resolution Imaging Spectroradiometer (MODIS) retrieval and the polarimetric retrieval from the Polarization and Directionality of the Earth's Reflectances (POLDER) instrument. Further, simulated POLDER data were used by Shang et al. (2015) to investigate the influence of cloud sub-grid variability on the POLDER-derived cloud effective radius and variance.
In our study, the wide-field and highly resolved 2-D measurements of specMACS are simulated based on a realistic field of shallow cumulus clouds as observed during the EUREC4A campaign. The cloud data were obtained from LESs using the PALM model (Raasch and Schröter, 2001; Maronga et al., 2015, 2020). This allows us to apply the stereographic reconstruction and the cloudbow algorithm to the simulated measurements and compare the results to the respective quantities determined by the model cloud field used for the simulations. Although it is well known that the signal of the cloudbow originates from single scattering and hence is weighted by exp (−τ), with τ being the optical thickness (Alexandrov et al., 2012a), we show that it is not straightforward to obtain the corresponding true model quantities. Nevertheless, the accuracy of the retrievals can be assessed, and possible error sources can be quantified. This allows for a deeper understanding of (multi-angle polarized) observations and their importance for the characterization of the clouds' microphysics.
To evaluate the accuracy of the retrieval algorithms, a 1 min overflight of HALO over a LES-simulated shallow cumulus cloud field, as frequently observed during the EUREC4A campaign (Bony et al., 2017) in the vicinity of Barbados in early 2020, was simulated. Highly resolved LESs were performed using the PALM model (Raasch and Schröter, 2001; Maronga et al., 2015). Within the 60 s overflight, the field of view of a single specMACS camera covers an approximate area of 32×21 km2. Hence, a large cloud field of 25.6×12.8 km2 horizontal extent was simulated for a duration of 2 min with a second-by-second output at a horizontal grid size of 10×10 m2 to match the high spatial resolution of the two polarization cameras of specMACS. The vertical resolution was set to 5 m with up to 2 km height, which is approximately the height of the cloud tops. Above, the resolution is reduced until a resolution of approximately 15 m is reached at an altitude of 3 km. The LESs were initialized by dropsonde measurements from 28 January 2020 during the EUREC4A campaign. On that day, wide cloud patterns of shallow cumuli were observed (Stevens et al., 2021). In Fig. 1a, the vertical wind profiles of the horizontal wind components u and v as well as the horizontal wind speed and its direction are shown for the first time step used for the simulation of the specMACS measurement. Within the minute of the simulated overflight, the wind profiles do not change significantly and hence are representative of the horizontal movement of the clouds.
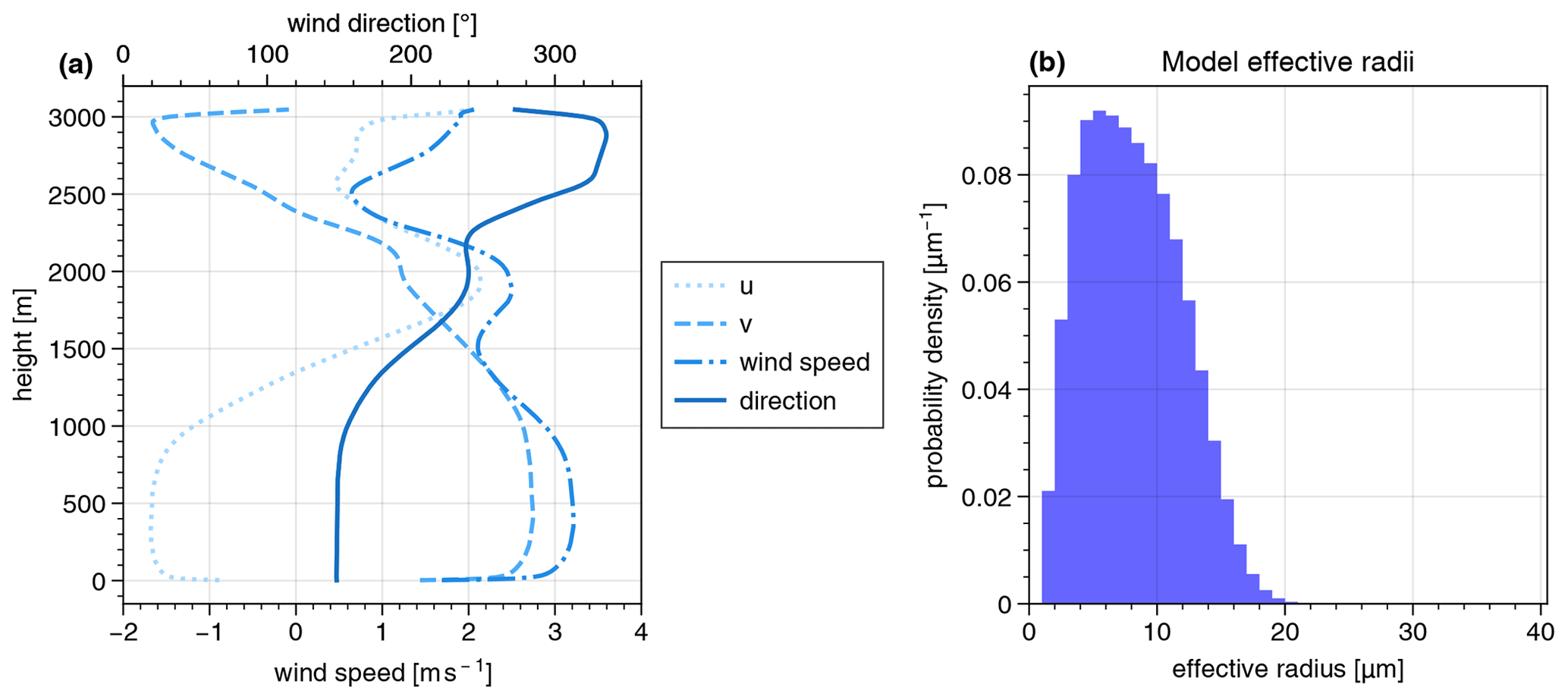
Figure 1(a) Profiles of the horizontal wind vector components u and v as well as total wind speed (lower x axis) and direction (upper x axis). (b) Probability density distribution of effective radii in the model domain of the first simulated time.
Following Maronga et al. (2015, 2020), PALM uses a bulk two-moment liquid-phase cloud microphysics scheme of Seifert and Beheng (2001, 2006), providing the cloud droplet number concentration (N) and specific water content (LWC). In our setup, an extended scheme following Seifert and Beheng (2006), Khairoutdinov and Kogan (2000), Khvorostyanov and Curry (2006), and Morrison and Grabowski (2007) was used. For the MYSTIC simulations, the cloud microphysics need to be described in terms of the liquid water content (LWC), the effective radius (reff) and the effective variance (veff). While the LWC is directly retrieved from the LES model output, the reff is derived from the model variables following Martin et al. (1994):
Here, N is the water droplet density in cubic meters and comes from the LES model output, and ρ is the water density (1000 kg m−3). k is the ratio between the volume mean radius and the effective radius each to the third power: . For maritime air masses, Martin et al. (1994) determined , hence k=0.80 was chosen for the calculation of the effective radius from the LES data following Eq. (1). The resulting distribution of effective radii for the first simulated time can be seen in Fig. 1b. For all other times, the distribution looks similar (not shown here). For the radiative transfer simulations, we assumed a constant effective variance of veff=0.1 to determine the optical properties of the clouds. Since k and veff are related by for modified gamma distributions (e.g., Grosvenor et al., 2018), this corresponds to a value of k=0.72. However, as k is only used to derive an effective radius which is not provided by the LES model, the simulations are internally consistent, and the choice of k does not impact the analysis of this paper.
As shown by Marshak et al. (1998) for marine stratocumulus clouds, the radiative effects of a cloud are sufficiently well represented in 3-D radiative transfer models if the spatial resolution of the model input resolves the mean free photon path l of the clouds, which is given by the inverse of the extinction coefficient . For the clouds obtained from the LES model, the mean free photon path was roughly estimated to be of the order of 20 m, which is comparable to the 20–30 m stated by Marshak et al. (1998) for overcast marine stratocumulus clouds. Therefore, it was decided to reduce the horizontal resolution of the grid for the computationally expensive radiative transfer simulations by a factor of 2 such that the grid size is 20×20 m2, while the vertical resolution was reduced by a factor of 5 to about 25 m. In spite of the eventual resolution reduction for the radiative transfer simulations, the highly resolved LESs with a horizontal grid size of 10 m remain crucial due to the internal smoothing in the model.
The simulations of realistic measurements of the two polarization cameras of specMACS were performed using the 3-D radiative transfer model MYSTIC (Mayer, 2009), which is part of the freely available libRadtran radiative transfer package (Mayer and Kylling, 2005; Emde et al., 2016). MYSTIC allows for the simulation of scalar radiances and also polarized radiation originating from scattering events of photons on cloud and aerosol particles or molecules (Emde et al., 2010). The number of photons was chosen so that the noise of the Monte-Carlo-simulated intensity had an average standard deviation of about 6 %. The high computational costs were reduced by simulating measurements at a frequency of 1 Hz instead of the operating acquisition frequency of 8 Hz of specMACS. This is in accordance with the actual frame rate at which the stereographic reconstruction algorithm is applied. While the operational cloudbow retrieval is carried out at an angular resolution of 0.3°, this is reduced to approximately 1.25° for the simulations. Such a reduced angular resolution is still sufficient for the cloudbow retrieval: as shown in Fig. 13b in Miller et al. (2018), the minimum required Nyquist resolution to resolve the peaks of the supernumerary bows is about 1.2° for the largest effective radius simulated here of about 40 µm and a wavelength of 0.49 µm and hence just below the given angular resolution. For longer wavelengths and smaller effective radii, the minimum required resolution increases. However, as the effective radii in the model domain are mostly well below 25 µm (compare Fig. 1) at which the minimum required Nyquist frequency is about 1.5° at a wavelength of 0.49 µm, the features of the supernumerary bows, which are needed for an accurate determination of cloud droplet size distributions, are still well resolved in the simulations.
As described by Pörtge et al. (2023), the sensors of the two polarization cameras of specMACS are divided into 512×612 4×4 pixel blocks for the different color channels (red–green–green–blue) and the polarization directions. For the whole field of view, the measurements are interpolated to the full 2048×2448 grid. Hence, to simulate the specMACS measurements, the Stokes vectors measured at each 4×4 pixel block are simulated and then interpolated to the whole grid with regard to the polarization directions and the spectral response of the different color channels. Hereby, the simulations are performed in the wavelength range between 380 and 690 nm in 10 nm steps to represent the spectral response of the cameras as shown in Fig. 1b of Pörtge et al. (2023). The central wavelengths (bandwidths) of the three color channels are approximately 620 nm (66 nm), 546 nm (117 nm) and 468 nm (82 nm) (Pörtge et al., 2023). To represent the specMACS measurements, the simulations are weighted with the corresponding spectral response functions of the different color channels and polarization directions.
It was chosen to simulate a scene at a solar zenith angle of 30° and a solar azimuth angle of 20° such that the cloudbow was covered by the field of view of the camera. The flight direction was chosen toward the north with a horizontal aircraft attitude (the three Euler angles, roll, pitch and yaw, are 0°) for the whole flight. This geometry assures that the cloudbow is well visible in the field of view of the camera such that multiple cloud targets are observed from all scattering angles between 135 and 165° as required for the cloudbow retrieval (Pörtge et al., 2023).
Finally, MYSTIC allows us to simulate complex fields of both liquid water and ice clouds (Mayer and Kylling, 2005; Mayer, 2009). In this study, the simulated shallow LES clouds consist of liquid water droplets only. The optical properties are calculated by Mie theory (Wiscombe, 1980).
To begin with, it is shown that the simulated cloud field is representative of shallow cumuli measured during the EUREC4A campaign. This is demonstrated considering a scene measured on 28 January 2020 at 16:29 UTC by the polarization camera looking to the lower right of the aircraft in the flight direction (polLR; Weber et al., 2024) of specMACS. The measured and simulated RGB images can be seen on the left of Fig. 2. Both scenes show shallow cumuli, and from visual comparisons of the two RGB images, it can already be stated that the simulations (middle panel) seem to be realistic. The simulations resolve optically thin and small clouds as well as the general cloud structure recognizable, e.g., by shadows on the cloud surfaces. Shadows can also be detected on the underlying ocean surface, which is simulated using the bidirectional reflectance distribution function (BRDF) after Cox and Munk (1954a, b). In particular, shadows on the ocean surface are identifiable in the sunglint region, the specular reflection of the sun on the ocean surface. The position of the sunglint is determined by the relative position of the sun, which is different in both images because the simulations were not conducted for a specific flight geometry. Still, simulation and measurement can be compared in terms of the radiances as the solar zenith angle (SZA) is comparable for the measurement (SZA≈33°) and the simulation (SZA=30°).
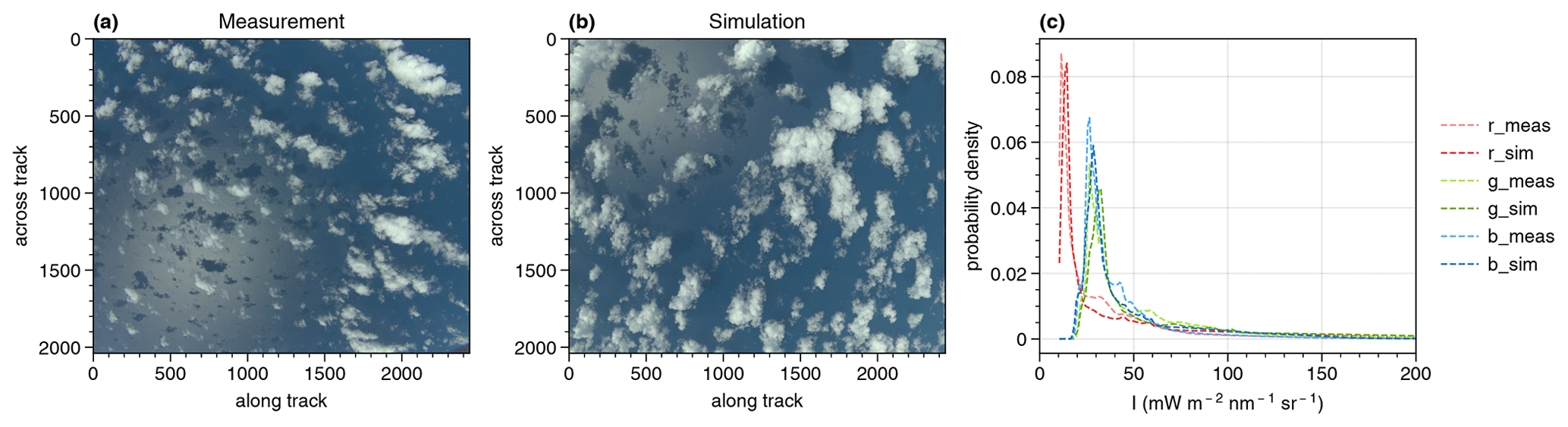
Figure 2RGB images of the scene measured by the polLR camera on 28 January 2020 at 16:29 UTC (a), which are compared to the simulated cloud field 30 s after the simulation start (b). In (c), the radiance histograms of the scene measured by the polLR camera compared to the simulated cloud field are shown. The three color channels, red (r), green (g) and blue (b), are shown separately for both the simulations (sim) and the measurements (meas).
For a more quantitative comparison, the measured and simulated radiances for the considered images are shown for the three color channels (red, green and blue) on the right of Fig. 2. Because of the similarity of the probability density functions of the different channels for the simulations and the measurements, the simulated cloud field can be stated to be representative of clouds as measured during the EUREC4A campaign.
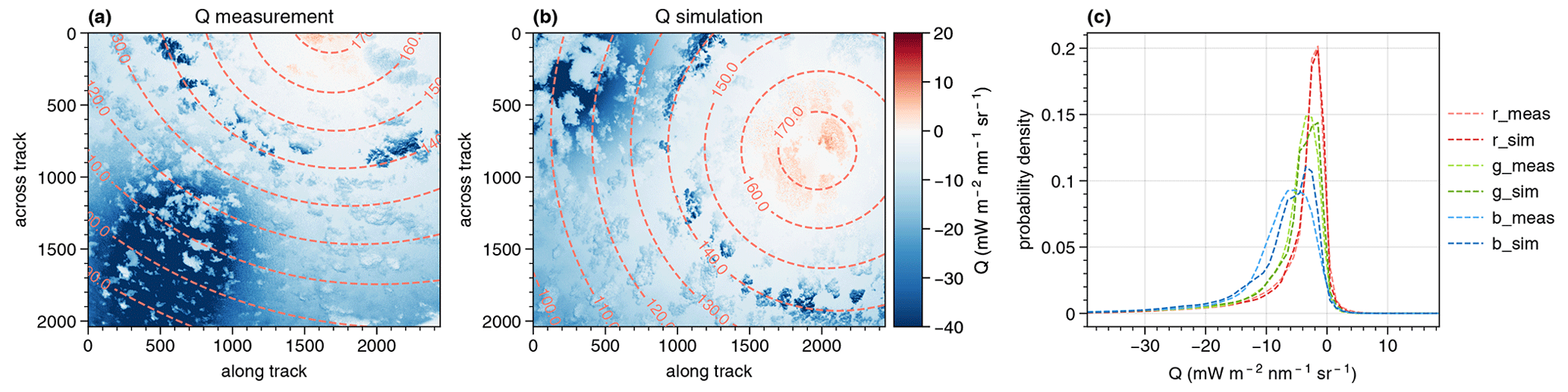
Figure 3Q component of the Stokes vector for the scene measured by the green channel of the polLR camera (a), which is compared to the green channel of the simulated Q component 30 s after the simulation start (b). The dashed lines denote the scattering angles. In (c), the simulated probability density functions of the Q components of the Stokes vector are compared for the cloudbow region between scattering angles of 135 and 165° to the measured ones. The three color channels, red (r), green (g) and blue (b), are shown separately for both the simulations (sim) and the measurements (meas).
In a similar manner, the components Q and U of the Stokes vector can be compared. For both the simulations and the measurements, the Stokes vector is defined with respect to the scattering plane such that U≈0, and the comparison can be reduced to the Q component. The respective measured and simulated results for the green channel are shown in Fig. 3. From the spatial distributions of Q it can be seen that the important features like the cloudbow and the sunglint show a linearly polarized signal of the same order for the measurement and the simulation. Since polarized radiances are much more sensitive to viewing geometry, the histogram on the right of Fig. 3 is restricted to the cloudbow region between 135 and 165° scattering angles. Except for some minor differences which are most likely due to the different geometries and cloud fields considered, the histograms for the different channels look very similar. Hence, it can be stated that the simulations are representative of the polarized measurements as taken during the EUREC4A campaign.
A main question for the evaluation of the retrieval results is how the derived data like cloud top heights and effective radius can be compared to the actual model input. This is related to the question of where the photons detected by the instrument originate from and, hence, which cloud top heights and cloud droplet size distributions we can expect to see from the model input. The polarized signal of the cloudbow is generated by both single and forward-directed multiple scattering, but since the latter does not affect the angular structure of the cloudbow, it also does not affect droplet size retrievals (Alexandrov et al., 2012a). Hence, the relevant contribution to the measured signal comes from singly scattered photons, which occur on average after the mean free photon path (roughly 20 m as stated above) at an optical depth of τ=1. To account for this, we performed a second simulation with MYSTIC using the same viewing geometry as 30 s after the simulation start and considered only singly scattered photons. For this simulation, the backward mode of MYSTIC was used, which implies that the photons are started at the detector and not at the sun (Mayer, 2009). It should be noted that the choice of a particular time and the corresponding fixed viewing geometry means that photons of oblique-viewing pixels might be scattered at higher altitudes in the cloud than nadir-looking pixels. However, we compared the retrieval results to two other reference simulations after 15 and 45 s and verified that the comparisons are similar both from the individual simulations and from a combination of the three reference simulations such that we will limit ourselves to the 30 s reference simulation in this paper. Performing these reference simulations without any scattering from molecules or aerosols ensures that the first scatter events of the photons will occur either on cloud droplets or on the Earth's surface. From the scatter locations, the indices of the respective grid boxes of the model input can be directly determined. On average, the first scattering events will happen at an optical depth of τ=1. We further used only a single wavelength, namely 550 nm, corresponding approximately to the central wavelength of the green channel of the polarization cameras. Due to the similar penetration depth of the visible wavelengths, using a single wavelength is representative of the determination of the first scatter events. For each viewing direction, 1000 photons were simulated, and their scatter event locations determine a weighting function along the line of sight of the instrument. Then, the average of all scattering event locations gives the location of the cloud part which is expected to be seen by the instrument, and hence the expected cloud top height can be estimated. Although the cloud top height retrieval is based on intensity measurements and hence on the detection of both single- and multiple-scattered photons, it is particularly important for the correct geolocalization of the cloud targets and the aggregation of the signal in the polarimetric retrieval. Therefore, the retrieved height should be as close as possible to the height from which the polarized signal and thus the single-scattering signal originates. Moreover, the stereographic algorithm is based on the identification of contrast gradients which are not visible deeper in the cloud. If an optical depth of τ=1 is not reached along the viewing direction, a corresponding fraction of photons will be scattered at the ground such that the vertical coordinate of the scatter event is 0. These scatter events are not taken into account for the determination of the average scatter location. To compare the derived cloud droplet size distribution to the expected one from the model, all scatter event locations of photons that did not hit the ground are taken into account separately. This is explained in more detail at the beginning of Sect. 5.2.
5.1 Stereographic reconstruction of cloud geometry
To begin with, the stereographic-derived cloud top heights are compared to the expected heights from the model. As already explained, the results of the retrieval algorithms were compared to the cloud data after a simulated flight time of 30 s, corresponding to half of the totally simulated period. The corresponding RGB image and Q component of the Stokes vector can be seen in Figs. 2 and 3. To compare the heights derived from the retrieval and the model, the points were projected onto the pixels of the camera such that they can be compared pointwise. From the expected model data, only the points were selected where stereo points were derived and vice versa. The resulting cloud top heights as well as the respective distributions derived from the model input and the stereographic reconstruction are shown together with their pointwise differences in Fig. 4 for both the realistic simulation and the simulation where the clouds did not evolve in time. The derived points were projected onto the same image as shown in Fig. 2b.
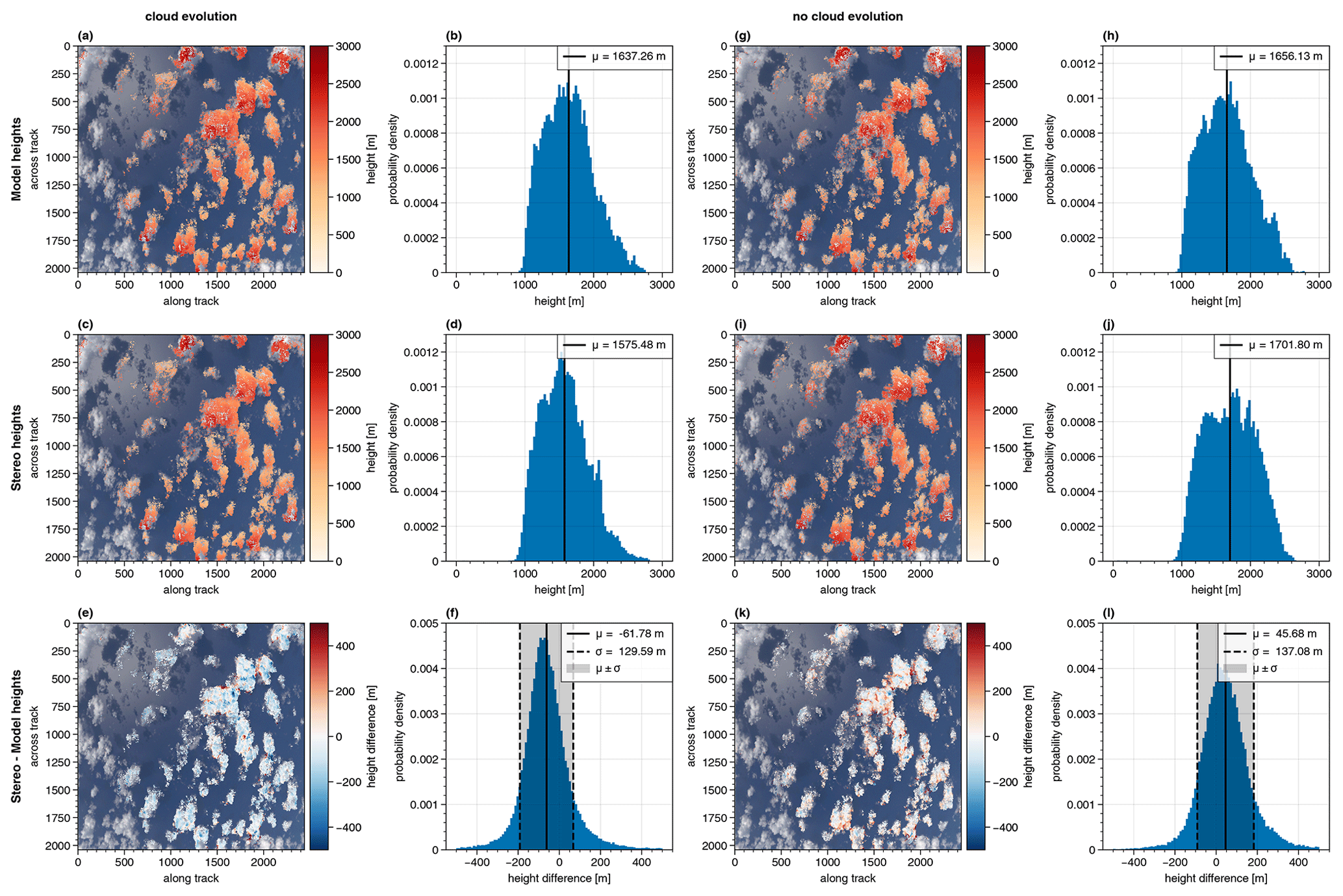
Figure 4Comparison of the cloud top heights expected from the model and derived from the stereographic reconstruction algorithm for the two simulations with (left) and without cloud development (right). The cloud top heights as expected from the model input (model heights) can be seen for the realistic simulation in the top left row (a, b) and the simulation without cloud development in the top right row (g, h). The stereographic-derived cloud top heights for the two simulations are shown in the middle panel (c and d as well as i and j). Below, the pointwise differences are shown (e and f as well as k and l). The derived points were projected onto the simulated RGB image, and the corresponding histograms are shown.
Figure 4 shows the heights from the model input and the stereographic reconstruction. They compare very well not only from their absolute values defined by the colors but also from their spatial structure. Comparing the histograms for the realistic simulation on the left of Fig. 4, the stereographic-derived cloud top heights have a mean of about 1575 m (Fig. 4d), while the model heights have a mean of about 1637 m (Fig. 4b). Hence, the stereographic-derived heights are on average underestimated by about 62 m compared to the expected heights from the model input.
At the bottom of Fig. 4, the differences between the stereo heights and the model heights (Fig. 4e) as well as the corresponding histogram (Fig. 4f) are shown. Areas where the stereographic reconstruction algorithm overestimates the cloud top heights are red, while blue areas mark heights underestimated by the stereo algorithm. The distribution of the histogram in Fig. 4f bears resemblance to a normal distribution with a shift to the left, which shows the underestimation of the stereographic-derived heights with a mean difference of about m. The grey-shaded area marks the ±σ interval with σ≈130 m being the standard deviation. Moreover, as can be seen from both the histogram and the scatter points, there are some significant differences between single points up to ±500 m and more. The colors of the projected points on the bottom left of Fig. 4 show positive differences (red) mainly where the cloud is generally lower (i.e., at the edges and in the shadows) and negative (blue) values mostly at the cloud tops.
One possible error source of the stereographic reconstruction is the development of the clouds with time and their advection. As can be seen from Fig. 1a, the v component of the wind vector is on average positive over the whole model domain and in all heights, although its values only range between approximately 0.5 and 2.6 m s−1. The flight direction was northward, and due to the positive v component, the velocity of the cloud relative to the moving airplane is reduced. This, in turn, is interpreted by the algorithm as lower cloud top heights. In order to eliminate this source of error and to estimate how the cloud development impacts the cloud top heights derived from the stereographic reconstruction, a simulation with the same geometric settings as before was performed. However, now the cloud input file given to MYSTIC was not changed, while the aircraft was simulated to fly over the model domain. Hence, the clouds do not develop, and in this simulation we see exactly the same clouds from different perspectives during the overflight. Moreover, they do not move with the wind as they remain at the same position in the model frame for the whole simulation. The corresponding results from this simulation are shown on the right of Fig. 4. The heights retrieved from the LES model input for the simulation without cloud development are shown in Fig. 4g and h. From the histogram, a mean value of about 1656 m can be extracted. The corresponding cloud top heights from the stereographic reconstruction method are depicted below (Fig. 4i and j). Here, the distribution indicates a mean value of 1701 m. Comparing the two mean values shows an overestimation of the stereographic heights by approximately 46 m.
Figure 4k shows the pointwise differences between the stereographic-retrieved cloud top heights and the model heights for the simulation without cloud evolution, and in Fig. 4l the respective histogram of the differences can be seen. Next to the mean difference of about μ=46 m, a standard deviation of about 137 m is derived. Looking at the points projected onto the RGB image, the red and blue areas again demonstrate where the stereo heights are over- or underestimated compared to the model heights. Once more, the red areas are mostly located close to the cloud edges and in the shadow regions, while the blue areas are mainly in the middle of the clouds. Hence, this effect seems to be systematic and cannot be explained by the cloud evolution. One possible explanation for this could be the comparison of the stereographic cloud top heights, which are based on intensity measurements, to the model cloud top heights, which were determined by only taking the first scatter events of photons started at the detector into account. This could lead to biases in the “expected” model heights when for example multiple scattering becomes important. However, as explained in Sect. 5, the algorithm is based on the identification of contrasts, which will not be visible deeper into the cloud. Moreover, the signal will smooth out when multiple scattering becomes more important, making it harder for the algorithm to detect any features. The impact of multiple scattering on the contrasts detectable by the algorithm will be addressed further in future studies.
Nevertheless, it can be concluded that the cloud geometry and in particular the cloud top heights can be well determined using the stereographic reconstruction algorithm, with average differences from the expected heights of less than 70 m and a standard deviation of about 130 m. The average deviation is expected to reduce even further if the wind movement of the clouds is considered. The small uncertainty in the cloud top heights found here is particularly valuable for the correct aggregation of the cloudbow signal and, hence, the polarimetric retrieval of the cloud droplet size distribution. Because of the comparison to the expected model heights derived from the single-scattering simulations, the uncertainty found here corresponds to the uncertainty in the origin of the polarization signal and hence the uncertainty in the signal aggregation in the polarimetric retrieval.
Kölling et al. (2019) compared the retrieved cloud top heights to the cloud top heights derived from the WALES lidar for measurements during the NAWDEX campaign in October 2016 and found a median difference of 126 m. Hereby, the stereo heights were found to be lower. Furthermore, it was indicated that the most prominent outliers in regions of high lidar cloud top height and low stereo height were observed for thin cirrus layers above cumulus clouds. In those scenes, the lidar is sensitive to the upper ice cloud layer, while the stereo algorithm detects image areas with high contrasts, which are preferably observed for lower cloud layers. To overcome this problem of different instrument sensitivities, the realistic simulations performed in this study could be used to evaluate the performance of the stereographic reconstruction method. Similar stereographic techniques are also used for the derivation of cloud top heights from other air- and spaceborne instruments. For example, Moroney et al. (2002) find a predefined accuracy of ±562 m for the operational retrieval of the Multi-angle Imaging Spectrometer (MISR) cloud top heights derived on a 1.1 km grid from aboard NASA's Terra satellite. This is explained by limitations in the matching algorithms of the stereo images. However, using an advanced sub-pixel least squares matching technique, this error could be reduced to 280 m, as shown by Seiz et al. (2006). Further, Seiz et al. (2006) applied the same algorithm to the Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER), which is also operated on board Terra and has a resolution of 15 m, which is comparable to that of specMACS. For the ASTER cloud top heights, an accuracy of 12.5 m is found with an additional uncertainty of about 100 m for every 1 m s−1 uncertainty in the wind component aligned with the direction of the satellite's orbital track. From RSP measurements, cloud top heights are derived using the cross correlations between a set of consecutive nadir reflectances and sets at other viewing angles for multiple assumed cloud top heights (Sinclair et al., 2017). Then, cloud layers are identified from distinct peaks in the resulting correlation profile. Sinclair et al. (2017) find that the cloud top heights derived from RSP have median errors of 0.5 km when compared to lidar measurements. Hence, the given accuracies for the cloud top heights are much higher than the ones found for specMACS in this work and the lidar-based comparison shown in Kölling et al. (2019). As for specMACS, the retrieved cloud top heights are used as input for the aggregation process of RSP measurements (Alexandrov et al., 2016). The analysis in this paper shows that the cloud top heights derived from specMACS using the stereographic approach have much smaller uncertainties and hence should lead to smaller errors in the aggregation of the polarized radiance signal on which the polarimetric technique relies.
5.2 Cloud droplet size distributions
As described in Sect. 5, the locations of the cloud top height and effective radii seen by the instrument can be determined from simulations of singly scattered photons. From the scatter locations, the model grid boxes in which the scatter events occur are determined and hence the effective radius of the cloud droplet size distribution at which the photon is scattered. Since photons detected by single pixels of the detector are scattered in various model grid boxes, the signal that is actually seen by that pixel originates from different cloud droplet size distributions. For real measurements, the actual distributions are not known, but the cloudbow retrieval assumes that the signal comes from cloud droplets obeying a modified gamma distribution as described by Hansen (1971) with
The two parameters, a=reff and b=veff, are referred to as the mean effective radius reff and the effective variance veff respectively, which can be used to define the radiative properties representative of a cloud. They are given by
and
In this study, the cloud properties were explicitly defined for the simulations: the droplet size distribution of each grid box is given by a modified gamma distribution with a constant effective variance of veff=0.1 and the respective effective radius of the grid box. As described above, the signal measured by single pixels of the detector originates from scattering events in different grid boxes and thus different droplet size distributions. Hence, to find the effective radius and variances which are really seen by the instrument, the gamma distributions of the single grid boxes in which the photons are scattered have to be superimposed. As shown by Shang et al. (2015), the sum of two or more gamma distributions is not another gamma distribution and in particular is the cloud droplet effective radius and variance of the combined gamma distributions, not just the averages of the respective quantities of the single distributions. The grid box of the model data (and therefore the corresponding droplet size distribution) is determined from the position of the singly scattered photons. For all the pixels which are simultaneously evaluated by the cloudbow retrieval, the distributions seen by the singly scattered photons of the corresponding simulated pixels can then be superimposed to obtain one distribution as seen by the instrument. The resulting distribution does not have a precisely determinable shape, but the effective radius and variance of that distribution can be calculated using two different techniques: at first, the cloudbow retrieval assumes a gamma distribution for the droplet size distribution so it would be reasonable if the derived effective radius and variance resemble the effective radius and variance of the best-fitting modified gamma distribution to the total droplet size distribution. Second, the effective radius and variance can be calculated using their definitions after Eqs. (3) and (4). For modified gamma distributions in the form of Eq. (2) and a constant effective variance for all sub-distributions, this can be simplified as shown by Alexandrov et al. (2012a) such that
and
Here, and denote the total effective radius and variance of the combined distributions, while reff and veff are the respective quantities of the single distributions. The angular brackets denote averages. Hence, the effective radius and variance that should be derived from the polarized measurements of the cloudbow are and respectively.
Both methods showed nearly identical results for the calculation of the expected effective radius and variance from the model input for the simulations of this study. Therefore, in the following, we compare the results of the cloudbow retrieval to the best-fitting gamma distribution of the single-scattering simulations only. For all figures the same time point as for the stereo heights was chosen (30 s after the simulation start), and only the parts of the image where the cloudbow retrieval could be applied are compared.
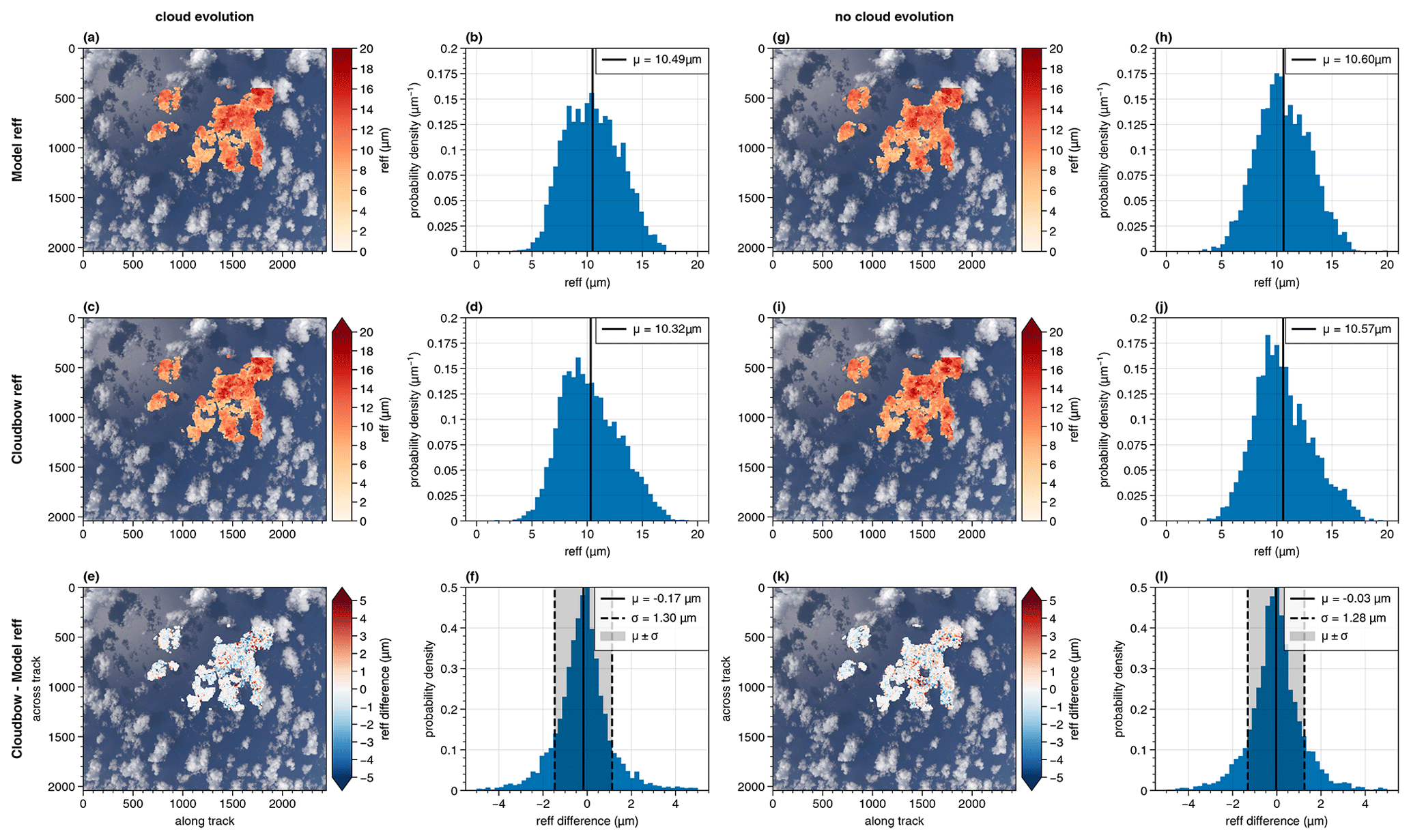
Figure 5Comparison of the cloudbow retrieval result for the effective radius (middle) to the expected model effective radii (top) for the simulation with cloud evolution (left, a to f) and the simulation where the clouds did not develop (right, g to l). At the bottom, the corresponding pointwise differences are shown. The points are projected onto the RGB image of the simulation, and next to that the respective distributions are shown in the form of a histogram with the mean value marked by the solid vertical line. The grey-shaded area in the lower histograms marks the 1σ interval.
In Fig. 5 the expected effective radius from the model input is shown and compared to the results from the cloudbow retrieval for both the realistic simulation with developing clouds (left) and the idealistic case where the clouds did not evolve over time (right). Compared to the stereographic-derived cloud top heights considered before, it can be seen that only parts of the image are evaluated. This is due to the specific scattering angle range (135 to 165°) under which a cloud target needs to be observed during the overflight such that the cloudbow algorithm can be applied. Moreover, the 10×10 pixel cloud targets have a coarser resolution than the points found by the stereo tracker for a cloud scene as considered here, where many contrast gradients are identified by the tracking algorithm. To start the comparison between the cloudbow results and the expected model input, we observe that the spatial distributions of the projected effective radii onto the RGB image derived from the cloudbow retrieval closely match the spatial distributions expected from the model input. This holds true for both cases of evolving and non-evolving clouds. Moreover, the histograms show a similar width of the distributions of effective radii. For the case of evolving clouds, the mean effective radius for the scene derived by the cloudbow retrieval is 10.32 µm and compares well to the expected mean effective radius of 10.49 µm from the model input. In the case of non-evolving clouds, the mean deviation of the cloudbow retrieval from the expected effective radii reduces slightly, with an expected mean effective radius of 10.60 µm compared to 10.57 µm derived by the cloudbow retrieval.
At the bottom of Fig. 5 the pointwise differences between the effective radii from the cloudbow retrieval and the expected ones from the model as well as the corresponding histograms are shown. As before for the cloud top heights, the red areas mark overestimations and blue areas underestimations of the effective radius by the cloudbow retrieval compared to the expected effective radii from the model input. For the case of developing clouds, the spatial distribution of the differences projected onto the RGB image rather shows blue values, thus indicating an average underestimation of the effective radius by the retrieval. A mean difference between the retrieval results and the model of −0.17 µm is derived. Moreover, the standard deviation is given by 1.30 µm. For the idealistic simulation of non-evolving clouds, the mean difference reduces to −0.03 µm with a standard deviation of 1.28 µm. For the clouds and the viewing geometry considered in the simulation, it takes about 35 s to observe one cloud target under the necessary scattering angles between 135 and 165°. During that time, the clouds develop in the case of the realistic simulation, hence influencing the multi-angular measurement of the polarized radiance. Moreover, the clouds move at a speed of 2–3 m s−1, as can be seen from Fig. 1a for the determined typical cloud top heights between 1000 and 2000 m. This corresponds to horizontal displacements of 70 to 105 m within an observation period of 35 s and hence displacements of the order of one cloud target. Consequently, the retrieval becomes even more accurate when considering clouds that do not develop and do not move with the wind.
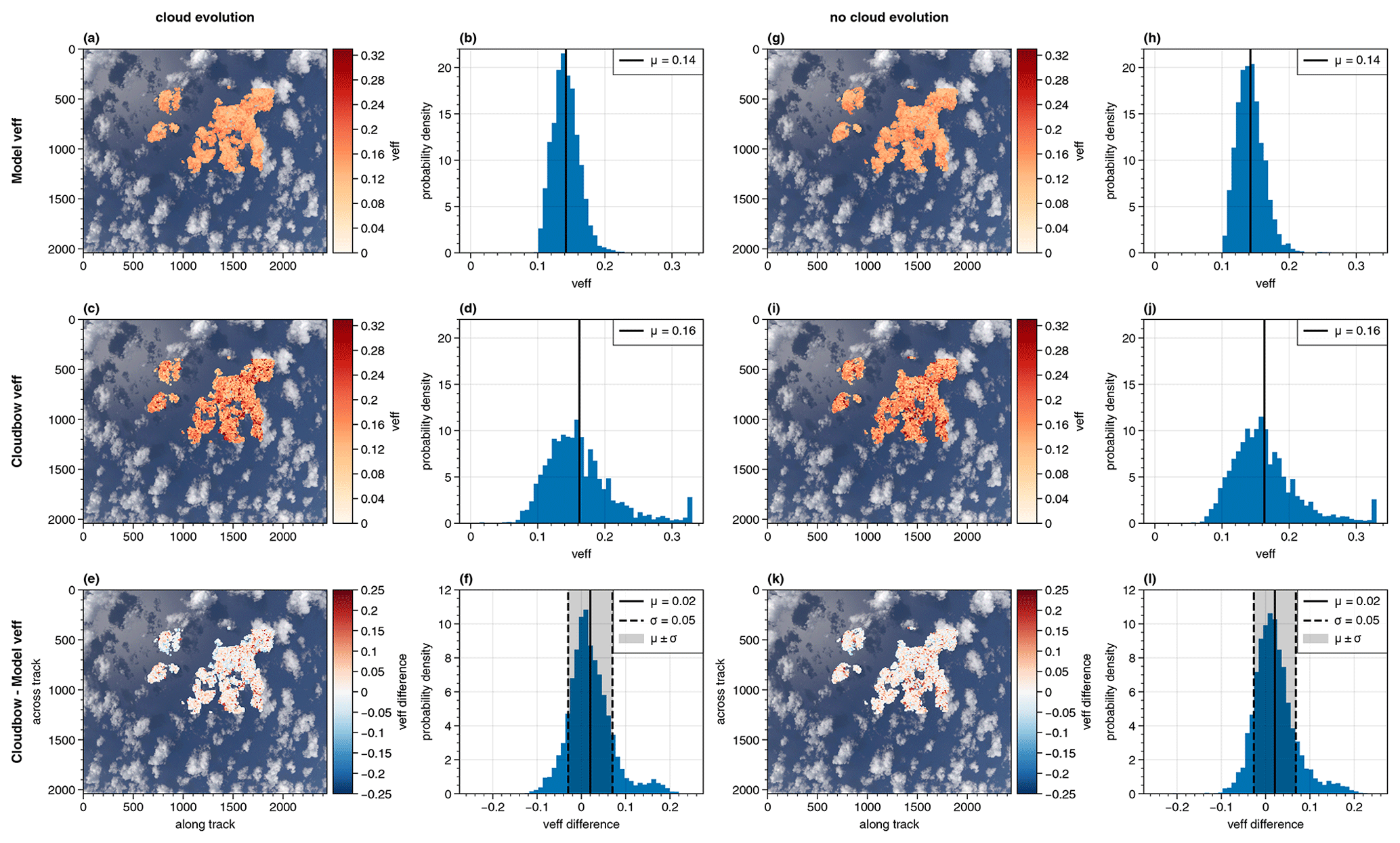
A similar analysis can be done for the results of the effective variance which are given in Fig. 6. Again, the results are given for the two simulations (evolving and non-evolving clouds), although they hardly differ from each other. For both simulations, the expected mean effective variance is given by 0.14 with a rather narrow distribution (compare Fig. 6b and h). It should be noted again that there is no underlying signal in the effective variance itself, as it was held constant over the model domain with a value of veff=0.1. Nevertheless, the distributions show that all expected effective variances are larger than 0.1, which shows the variation in the effective radius within one cloud target and is as expected from Eq. (6). In future studies, additional variations in the effective variance should be considered such that the sensitivity of the polarimetric retrieval to natural variations in the effective variance is also tested. A comparison of the cloudbow retrieval results to the expected ones shows wider distributions and a larger mean of 0.16 for the two simulations. The mean difference between the cloudbow retrieval and the expected ones from the model is 0.02 with a standard deviation of 0.05. The distribution of the cloudbow retrieval shows an accumulation of effective variances at 0.32, which is the maximum effective variance covered by the retrieval. To summarize, the difference distributions at the bottom of Fig. 6 show a general overestimation of the effective variance by the cloudbow retrieval (mostly red points in the spatial distribution). This is supported by the histograms in Fig. 6f and l.
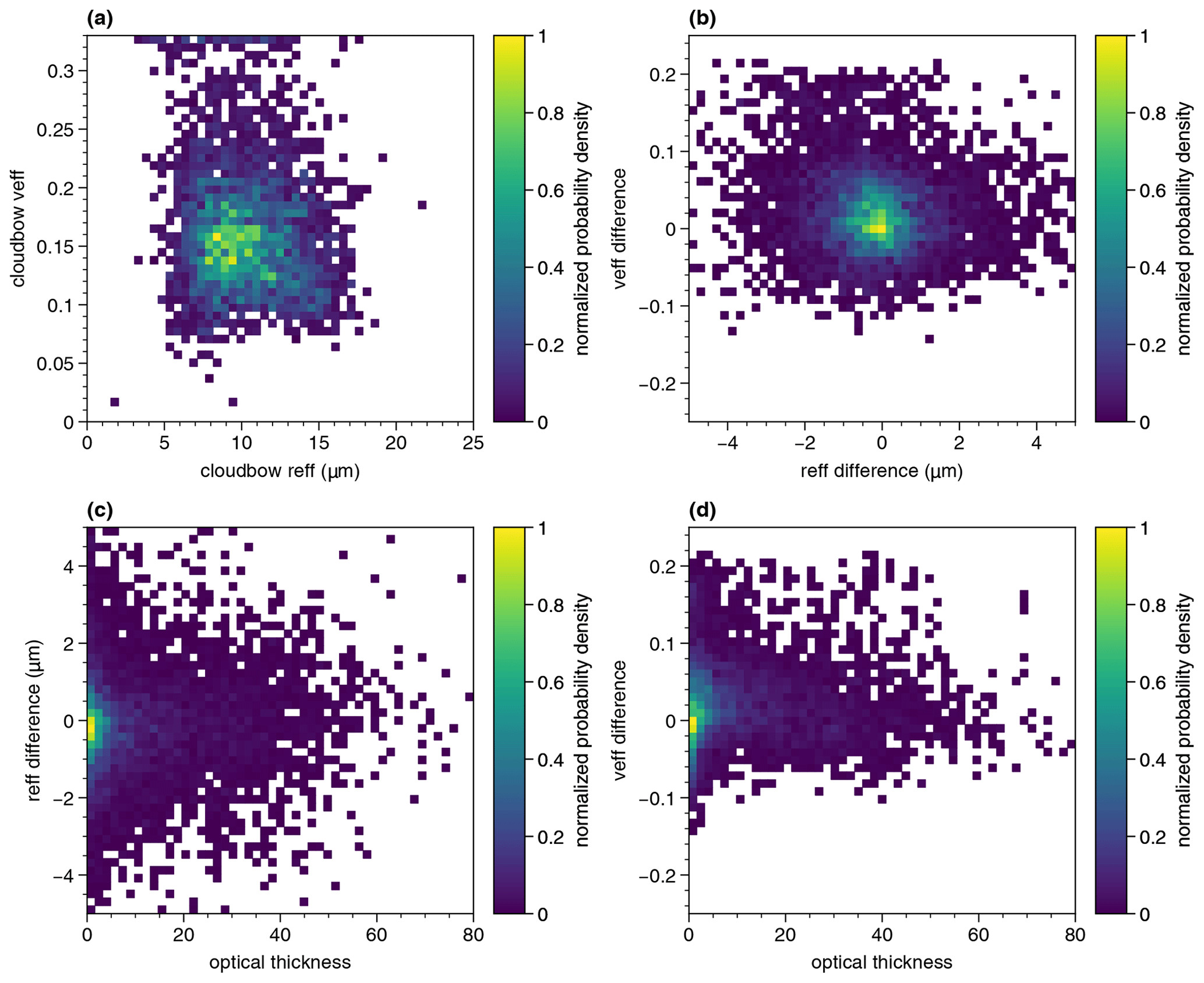
Figure 7Correlations between retrieved effective radius and variance (a), the corresponding differences from the expected values from the model in (b), and the relations of the effective radius (c) and variance (d) differences to the cloud optical thickness.
We further studied the correlations between errors in the effective radius and variance and the underlying optical thickness for all target points. The results are shown in Fig. 7 as normalized probability densities. From Fig. 7a, which shows the retrieved effective variance with respect to the retrieved effective radius, it can be seen that large effective variances occur over the full range of retrieved effective radii. The accumulation of effective variances at the maximum effective variance covered by the retrieval is also observed in retrievals applied to real measurement data (Pörtge et al., 2023). Therefore, we performed further studies with a focus on retrievals with veff=0.32 by looking at correlations to other parameters either given by the cloud field studied (i.e., optical thickness) or derived from the retrieval, i.e., the effective radius and its difference from the expected one or the goodness of the fit. However, none of the performed analyses showed a clear correlation. Moreover, we studied potential correlations between the effective radius and variance errors, which can be seen in Fig. 7b. It can be seen that most retrievals have small differences in both the effective radius and the variance, which again emphasizes the general accuracy of the retrieval. However, there are no significant correlations between large effective radii differences and large effective variance differences. The two lower panels of Fig. 7 show the correlations between the two differences to the nadir optical thickness of the observed cloud target. From both Fig. 7c and Fig. 7d it can be seen that most of the points have low optical thicknesses. In Shang et al. (2016) it was shown that polarized reflectances (which are proportional to polarized radiances for constant solar zenith angles) do not fully saturate for optical thicknesses smaller than τ=10. This, in turn, could be thought of as impacting the results of the retrieval. However, as can be concluded from the same figures, there are many points which show accurate results for low optical thicknesses as well. Moreover, there are no further obvious correlations between errors in the effective radius or variance and the optical thickness.
An explanation for the overestimation of the effective variance derived by the cloudbow retrieval might be the large sub-grid variability of the signal (not shown here), which has been observed during the evaluation process for the shallow cumulus clouds considered in this study. A similar sub-grid variability could also be observed for measurements of highly structured cloud fields and hence might indicate that the application of the retrieval on those cloud types can be difficult. In particular, large effective variances are retrieved if the supernumerary bows of the cloudbow are suppressed (Pörtge et al., 2023), which might be the case for highly variable signals. Likewise, Shang et al. (2015) observed a high biased effective variance for inhomogeneous cloud fields on the sub-grid scale.
A systematic bias towards higher effective variances has also been observed by Alexandrov et al. (2012a), who evaluated the performance of the RSP retrieval algorithm on realistic clouds. Tests on 1-D plane-parallel simulations in the solar principle plane revealed deviations of the effective variance between 6 % and 27 % and decreasing errors towards smaller reff, while the retrieved effective radius showed on average an accuracy better than 0.15 µm. Alexandrov et al. (2012a) explained the bias in the effective variance with the “smoothing” effect on the polarized reflectance generated by multiple scattering. Moreover, they concluded from comparisons between 3-D and 1-D simulations that vertical variations in the effective radius are interpreted as larger effective variances in the 3-D simulations compared to the 1-D analogues due to the side illuminations of the clouds. Hence, the results from Alexandrov et al. (2012a) in combination with the observed large sub-grid variability in the polarized radiance for highly structured clouds can explain the bias towards higher effective variances derived from the cloudbow retrieval than expected from the model input.
Figure 8 shows an example of the expected cloud droplet size distribution as derived from the model input for one 10×10 pixel cloud target of the realistic simulation. The corresponding gamma distribution fit used for the comparison to the cloudbow retrieval result is shown in blue with an effective radius of reff=13.22 µm and an effective variance of 0.12. The cloud droplet size distribution associated with the effective radius of reff=12.95 µm and an effective variance of 0.15 derived from the cloudbow retrieval for that target is shown in dashed red lines. Despite the underestimation of the effective radius by −0.27 µm and the overestimation of the effective variance by 0.03, the derived cloud droplet size distribution is still very similar to the one expected from the model input. Hence, being able to determine the effective radius and variance with the average accuracy found in this study shows that the actual cloud droplet size distribution can be well retrieved from polarized measurements of the cloudbow in cases where the droplet sizes follow a simple gamma distribution. For arbitrary distributions, the so-called rainbow Fourier transform (RFT) described by Alexandrov et al. (2012b) allows for the retrieval of the actual shape of the distribution.
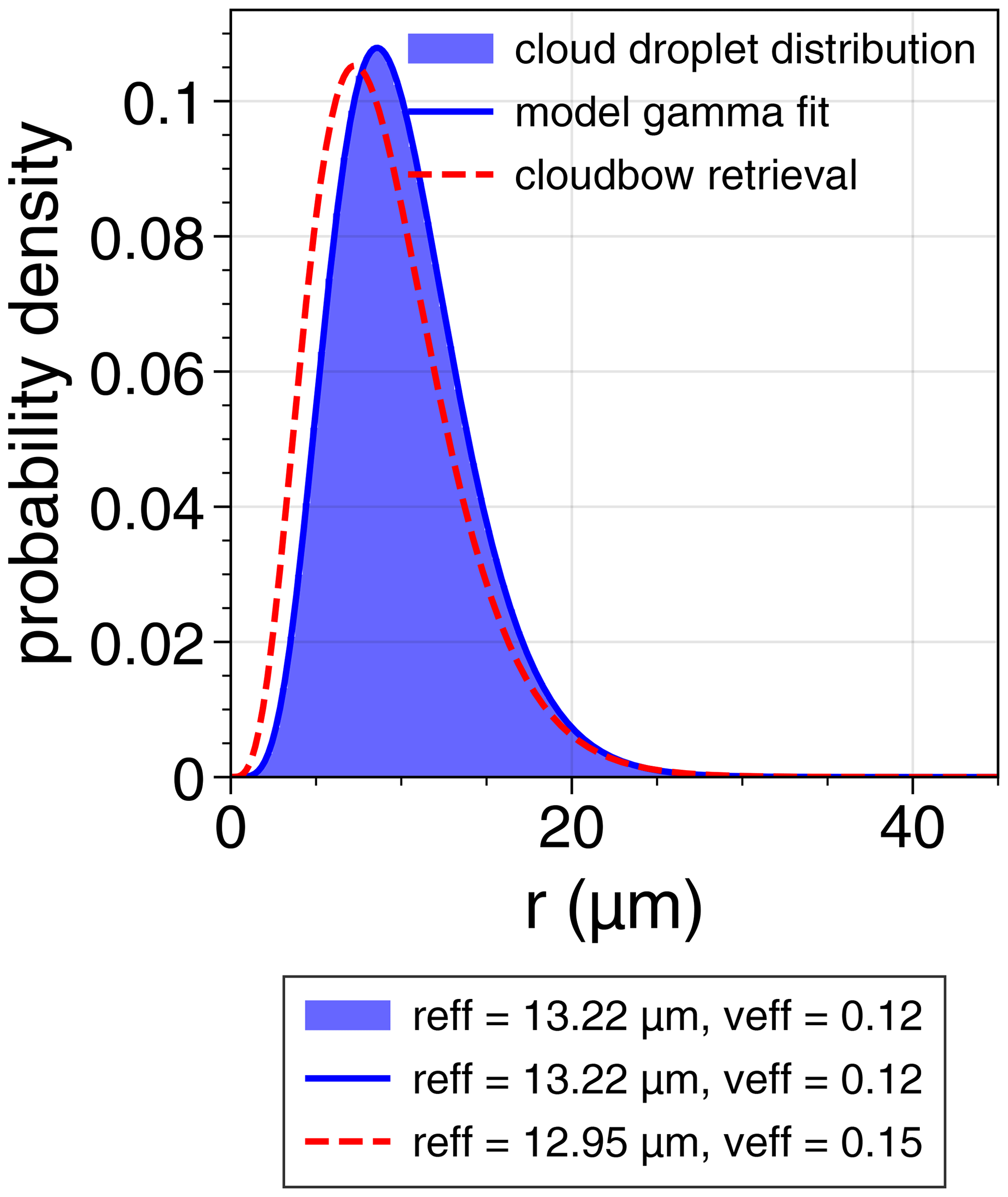
Figure 8Probability density distribution of cloud droplet radii determined from the LES model input with respect to one target pixel of the cloudbow retrieval. The blue line gives the corresponding best gamma distribution fit. In red, the cloud droplet size distribution, as derived for the cloud target from the effective radius and variance determined by the cloudbow retrieval, is shown.
To summarize, we found that the accuracy of the effective radius is on average µm. Compared to the average effective radius of 10.49 µm expected from the model input, this corresponds to a relative error of less than 2 %. For the effective variance, we found an average accuracy of (0.02±0.05). The average expected effective variance from the model input was 0.14 such that the corresponding error is less than 15 %. The presented results are similar to the ones found by Alexandrov et al. (2012a) for simulations of the 1-D along-track RSP measurements at a wavelength of 865 nm. As stated above, specMACS delivers 2-D measurements and has broader channels which might influence the accuracy of the polarimetric retrieval. Here we showed that the spectral response is not a severe limitation for the clouds considered, and it can be stated that the effective radius and the effective variance can be retrieved with high accuracy using measurements of the polarized radiance from specMACS in the region of the cloudbow. In particular, Mishchenko et al. (2004) described the requirements of measurements of the size distribution parameters of liquid water clouds for the quantification of aerosol effects on climate and stated an accuracy better than 1 µm or 10 % for the effective radius and 0.05 or 50 % for the effective variance. Taking this into account shows even more how valuable the measurements of the size distribution parameters derived from the angular shape and structure of the cloudbow can be for climate research.
In this study, measurements of the polarization-resolving polLR camera of specMACS flown on board the German research aircraft HALO were simulated using the 3-D radiative transfer model MYSTIC. The aim was the analysis of the accuracies of the retrieval algorithms applied to the measurements of the camera. The first algorithm is the stereographic reconstruction algorithm used to determine the cloud geometry and cloud top heights. The second algorithm is the polarimetric retrieval, which uses polarized measurements of the cloudbow to derive microphysical properties of the cloud droplet size distribution. Both algorithms rely on the observation of clouds from multiple viewing angles. Hence, a 1 min overflight over a realistic cloud field obtained from simulations with the LES model PALM was performed using the 3-D radiative transfer model MYSTIC. The LESs were initiated based on dropsonde measurements from the EUREC4A field campaign, which took place in early 2020 in the vicinity of Barbados, during which shallow cumulus convection was studied. In this way, it was ensured that the cloud field represents shallow cumuli as measured during the campaign, which could be shown by a qualitative comparison of the measured and simulated (total and polarized) radiance. In addition to the realistic simulation with advective and developing clouds, a theoretical simulation of non-evolving clouds was performed to test the sensitivity of the retrieval algorithms to cloud development and movement.
For the stereographic reconstruction of the clouds, it was shown that the derived cloud top heights differ on average by less than 70 m from the expected model heights with a standard deviation of about 130 m. In the case of non-evolving clouds, the deviation from the expected heights reduced to about 46 m with a standard deviation of about 137 m. A comparison of the pointwise differences revealed that the stereographic cloud top heights tend to be underestimated at the highest cloud tops, while they tend to be overestimated where the clouds are lower, i.e., at the cloud edges or in shadows.
Next to the cloud top heights from the stereographic reconstruction, the cloud droplet size distributions obtained in the form of the effective radius and effective variance from the polarized measurements of the cloudbow were tested in this study. Here, it was shown that the effective radius from the retrieval differs on average by about µm from the expected effective radius of the model input. In the case of non-evolving clouds the average difference is µm and thus slightly better than the result for the realistic simulation. The results for the effective variance were shown to be very similar for both simulated cases with evolving and non-evolving clouds. The mean difference was 0.02 with a standard deviation of 0.05. The distribution of effective variances derived from the cloudbow retrieval is broader than the expected distribution. The wider distribution might be explained by the fact that the effective variance highly depends on the signal of the supernumerary bows. If that signal is damped, larger effective variances are retrieved. The large sub-grid variability which has been observed for the shallow cumulus clouds considered in this study might cause such a damping of the signal. Comparing the results of the realistic simulation, including the cloud development and the idealistic case without any cloud evolution, indicates that the cloud development might also be one source of error of the overestimation of the effective variance by the retrieval. Furthermore, a smoothing of the signal due to contributions from multiple scattering and the stratification of the effective radius within the cloud can be reasons for this overestimation, as already observed by Alexandrov et al. (2012a). With respect to some outliers with larger errors in the effective radius or variance, we studied the correlation between the differences in the effective radius and variance retrieved and those expected from the model and the optical thickness. However, no significant correlation which could point to an error source was found.
In future, further investigations of the observed sub-grid variability are planned. In particular, a reduction in the resolution of the LES model output could be used to exclude any sub-grid variability. Moreover, it is planned to include natural variations in the effective variance in future studies. Furthermore, the approach of 3-D radiative transfer simulations will be used for the accuracy assessment of the two retrieval algorithms for other cloud types, such as deeper convective or mixed-phase clouds.
The PALM–LESs are published by Jakub and Volkmer (2023) (https://doi.org/10.57970/R4WFP-KP367). The specMACS data used in this study are available upon request from the corresponding author.
LV performed the 3-D radiative transfer simulations with MYSTIC, applied the stereographic reconstruction algorithm to the synthetic data and evaluated the results. VP and BM helped with setting up the radiative transfer simulations and actively participated in discussing the results. Furthermore, VP applied the cloudbow retrieval to the simulated data. FJ performed the required highly resolved model simulations using the PALM model.
At least one of the (co-)authors is a member of the editorial board of Atmospheric Measurement Techniques. The peer-review process was guided by an independent editor, and the authors also have no other competing interests to declare.
Publisher’s note: Copernicus Publications remains neutral with regard to jurisdictional claims made in the text, published maps, institutional affiliations, or any other geographical representation in this paper. While Copernicus Publications makes every effort to include appropriate place names, the final responsibility lies with the authors.
We want to thank Tobias Zinner and Anna Weber for their contributions to the general discussions during the working process. Further, the authors want to thank Claudia Emde for helping with questions regarding polarization.
This research has been supported by the Deutsche Forschungsgemeinschaft (grant nos. SPP 1294 and SFB/TRR 165).
This paper was edited by Piet Stammes and reviewed by two anonymous referees.
Alexandrov, M. D., Cairns, B., Emde, C., Ackerman, A. S., and van Diedenhoven, B.: Accuracy assessments of cloud droplet size retrievals from polarized reflectance measurements by the research scanning polarimeter, Remote Sens. Environ., 125, 92–111, https://doi.org/10.1016/j.rse.2012.07.012, 2012a. a, b, c, d, e, f, g, h, i, j, k
Alexandrov, M. D., Cairns, B., and Mishchenko, M. I.: Rainbow Fourier transform, J. Quant. Spectrosc. Ra., 113, 2521–2535, https://doi.org/10.1016/j.jqsrt.2012.03.025, 2012b. a
Alexandrov, M. D., Cairns, B., Emde, C., Ackerman, A. S., Ottaviani, M., and Wasilewski, A. P.: Derivation of cumulus cloud dimensions and shape from the airborne measurements by the Research Scanning Polarimeter, Remote Sens. Environ., 177, 144–152, https://doi.org/10.1016/j.rse.2016.02.032, 2016. a
Bony, S., Stevens, B., Frierson, D. M. W., Jakob, C., Kageyama, M., Pincus, R., Shepherd, T. G., Sherwood, S. C., Siebesma, A. P., Sobel, A. H., Watanabe, M., and Webb, M. J.: Clouds, circulation and climate sensitivity, Nat. Geosci., 8, 261–268, https://doi.org/10.1038/ngeo2398, 2015. a
Bony, S., Stevens, B., Ament, F., Bigorre, S., Chazette, P., Crewell, S., Delanoë, J., Emanuel, K., Farrell, D., Flamant, C., Gross, S., Hirsch, L., Karstensen, J., Mayer, B., Nuijens, L., Ruppert, J. H., Sandu, I., Siebesma, P., Speich, S., Szczap, F., Totems, J., Vogel, R., Wendisch, M., and Wirth, M.: EUREC4A: A Field Campaign to Elucidate the Couplings Between Clouds, Convection and Circulation, Surv. Geophys., 38, 1529–1568, https://doi.org/10.1007/s10712-017-9428-0, 2017. a, b
Bréon, F.-M. and Doutriaux-Boucher, M.: A comparison of cloud droplet radii measured from space, IEEE T. Geosci. Remote, 43, 1796–1805, https://doi.org/10.1109/tgrs.2005.852838, 2005. a
Bréon, F.-M. and Goloub, P.: Cloud droplet effective radius from spaceborne polarization measurements, Geophys. Res. Lett., 25, 1879–1882, https://doi.org/10.1029/98gl01221, 1998. a
Cairns, B., Russell, E. E., and Travis, L. D.: Research Scanning Polarimeter: calibration and ground-based measurements, in: SPIE'S International Symposium on Optical Science, Engineering, and Instrumentation, 18–23 July 1999, Denver, CO, USA, edited by: Goldstein, D. H. and Chenault, D. B., SPIE, 3754, 186–196, https://doi.org/10.1117/12.366329, 1999. a, b
Cox, C. and Munk, W.: Measurement of the Roughness of the Sea Surface from Photographs of the Sun's Glitter, J. Opt. Soc. Am., 44, 838–850, https://doi.org/10.1364/josa.44.000838, 1954a. a
Cox, C. and Munk, W.: Statistics of the sea surface derived from sun glitter, J. Mar. Res., 13, 198–227, 1954b. a
Deschamps, P.-Y., Breon, F.-M., Leroy, M., Podaire, A., Bricaud, A., Buriez, J.-C., and Seze, G.: The POLDER mission: instrument characteristics and scientific objectives, IEEE T. Geosci. Remote, 32, 598–615, https://doi.org/10.1109/36.297978, 1994. a
Diner, D. J., Xu, F., Garay, M. J., Martonchik, J. V., Rheingans, B. E., Geier, S., Davis, A., Hancock, B. R., Jovanovic, V. M., Bull, M. A., Capraro, K., Chipman, R. A., and McClain, S. C.: The Airborne Multiangle SpectroPolarimetric Imager (AirMSPI): a new tool for aerosol and cloud remote sensing, Atmos. Meas. Tech., 6, 2007–2025, https://doi.org/10.5194/amt-6-2007-2013, 2013. a
Emde, C., Buras, R., Mayer, B., and Blumthaler, M.: The impact of aerosols on polarized sky radiance: model development, validation, and applications, Atmos. Chem. Phys., 10, 383–396, https://doi.org/10.5194/acp-10-383-2010, 2010. a
Emde, C., Buras-Schnell, R., Kylling, A., Mayer, B., Gasteiger, J., Hamann, U., Kylling, J., Richter, B., Pause, C., Dowling, T., and Bugliaro, L.: The libRadtran software package for radiative transfer calculations (version 2.0.1), Geosci. Model Dev., 9, 1647–1672, https://doi.org/10.5194/gmd-9-1647-2016, 2016. a
Ewald, F., Kölling, T., Baumgartner, A., Zinner, T., and Mayer, B.: Design and characterization of specMACS, a multipurpose hyperspectral cloud and sky imager, Atmos. Meas. Tech., 9, 2015–2042, https://doi.org/10.5194/amt-9-2015-2016, 2016. a, b
Forster, P., Storelvmo, T., Armour, K., Collins, W., Dufresne, J.-L., Frame, D., Lunt, D., Mauritsen, T., Palmer, M., Watanabe, M., Wild, M., and Zhang, H.: The Earth's Energy Budget, Climate Feedbacks, and Climate Sensitivity, 923–1054, Cambridge University Press, Cambridge, United Kingdom and New York, NY, USA, https://doi.org/10.1017/9781009157896.009, 2021. a
Grosvenor, D. P., Sourdeval, O., Zuidema, P., Ackerman, A., Alexandrov, M. D., Bennartz, R., Boers, R., Cairns, B., Chiu, J. C., Christensen, M., Deneke, H., Diamond, M., Feingold, G., Fridlind, A., Hünerbein, A., Knist, C., Kollias, P., Marshak, A., McCoy, D., Merk, D., Painemal, D., Rausch, J., Rosenfeld, D., Russchenberg, H., Seifert, P., Sinclair, K., Stier, P., van Diedenhoven, B., Wendisch, M., Werner, F., Wood, R., Zhang, Z., and Quaas, J.: Remote Sensing of Droplet Number Concentration in Warm Clouds: A Review of the Current State of Knowledge and Perspectives, Rev. Geophys., 56, 409–453, https://doi.org/10.1029/2017rg000593, 2018. a
Hansen, J. E.: Multiple Scattering of Polarized Light in Planetary Atmospheres Part II. Sunlight Reflected by Terrestrial Water Clouds, J. Atmos. Sci., 28, 1400–1426, https://doi.org/10.1175/1520-0469(1971)028<1400:msopli>2.0.co;2, 1971. a
Jakub, F. and Volkmer, L. S.: PALM-LES / EUREC4A shallow cumulus dataset with 3D cloud output data, LMU Munich, Faculty of Physics [data set], https://doi.org/10.57970/R4WFP-KP367, 2023. a
Khairoutdinov, M. and Kogan, Y.: A New Cloud Physics Parameterization in a Large-Eddy Simulation Model of Marine Stratocumulus, Mon. Weather Rev., 128, 229–243, https://doi.org/10.1175/1520-0493(2000)128<0229:ANCPPI>2.0.CO;2, 2000. a
Khvorostyanov, V. I. and Curry, J. A.: Aerosol size spectra and CCN activity spectra: Reconciling the lognormal, algebraic, and power laws, J. Geophys. Res., 111, D12202, https://doi.org/10.1029/2005jd006532, 2006. a
King, M. D., Platnick, S., Menzel, W. P., Ackerman, S. A., and Hubanks, P. A.: Spatial and Temporal Distribution of Clouds Observed by MODIS Onboard the Terra and Aqua Satellites, IEEE T. Geosci. Remote, 51, 3826–3852, https://doi.org/10.1109/tgrs.2012.2227333, 2013. a
Kölling, T., Zinner, T., and Mayer, B.: Aircraft-based stereographic reconstruction of 3-D cloud geometry, Atmos. Meas. Tech., 12, 1155–1166, https://doi.org/10.5194/amt-12-1155-2019, 2019. a, b, c, d
Krautstrunk, M. and Giez, A.: The Transition From FALCON to HALO Era Airborne Atmospheric Research, in: Atmospheric Physics, Springer Berlin Heidelberg, 609–624, https://doi.org/10.1007/978-3-642-30183-4_37, 2012. a
Maronga, B., Gryschka, M., Heinze, R., Hoffmann, F., Kanani-Sühring, F., Keck, M., Ketelsen, K., Letzel, M. O., Sühring, M., and Raasch, S.: The Parallelized Large-Eddy Simulation Model (PALM) version 4.0 for atmospheric and oceanic flows: model formulation, recent developments, and future perspectives, Geosci. Model Dev., 8, 2515–2551, https://doi.org/10.5194/gmd-8-2515-2015, 2015. a, b, c
Maronga, B., Banzhaf, S., Burmeister, C., Esch, T., Forkel, R., Fröhlich, D., Fuka, V., Gehrke, K. F., Geletič, J., Giersch, S., Gronemeier, T., Groß, G., Heldens, W., Hellsten, A., Hoffmann, F., Inagaki, A., Kadasch, E., Kanani-Sühring, F., Ketelsen, K., Khan, B. A., Knigge, C., Knoop, H., Krč, P., Kurppa, M., Maamari, H., Matzarakis, A., Mauder, M., Pallasch, M., Pavlik, D., Pfafferott, J., Resler, J., Rissmann, S., Russo, E., Salim, M., Schrempf, M., Schwenkel, J., Seckmeyer, G., Schubert, S., Sühring, M., von Tils, R., Vollmer, L., Ward, S., Witha, B., Wurps, H., Zeidler, J., and Raasch, S.: Overview of the PALM model system 6.0, Geosci. Model Dev., 13, 1335–1372, https://doi.org/10.5194/gmd-13-1335-2020, 2020. a, b
Marshak, A., Davis, A., Wiscombe, W., and Cahalan, R.: Radiative effects of sub-mean free path liquid water variability observed in stratiform clouds, J. Geophys. Res.-Atmos., 103, 19557–19567, https://doi.org/10.1029/98jd01728, 1998. a, b
Martin, G. M., Johnson, D. W., and Spice, A.: The Measurement and Parameterization of Effective Radius of Droplets in Warm Stratocumulus Clouds, J. Atmos. Sci., 51, 1823–1842, https://doi.org/10.1175/1520-0469(1994)051<1823:tmapoe>2.0.co;2, 1994. a, b, c
Martins, J. V., Fernandez-Borda, R., McBride, B., Remer, L., and Barbosa, H. M. J.: The Harp Hype Ran Gular Imaging Polarimeter and the Need for Small Satellite Payloads with High Science Payoff for Earth Science Remote Sensing, in: IGARSS 2018–2018 IEEE International Geoscience and Remote Sensing Symposium, 22–27 July 2018, Valencia, Spain, IEEE, https://doi.org/10.1109/igarss.2018.8518823, 2018. a
Mayer, B.: Radiative transfer in the cloudy atmosphere, Eur. Physical J. Conf., 1, 75–99, https://doi.org/10.1140/epjconf/e2009-00912-1, 2009. a, b, c, d, e
Mayer, B. and Kylling, A.: Technical note: The libRadtran software package for radiative transfer calculations – description and examples of use, Atmos. Chem. Phys., 5, 1855–1877, https://doi.org/10.5194/acp-5-1855-2005, 2005. a, b
McBride, B. A., Martins, J. V., Barbosa, H. M. J., Birmingham, W., and Remer, L. A.: Spatial distribution of cloud droplet size properties from Airborne Hyper-Angular Rainbow Polarimeter (AirHARP) measurements, Atmos. Meas. Tech., 13, 1777–1796, https://doi.org/10.5194/amt-13-1777-2020, 2020. a
Miller, D. J., Zhang, Z., Platnick, S., Ackerman, A. S., Werner, F., Cornet, C., and Knobelspiesse, K.: Comparisons of bispectral and polarimetric retrievals of marine boundary layer cloud microphysics: case studies using a LES–satellite retrieval simulator, Atmos. Meas. Tech., 11, 3689–3715, https://doi.org/10.5194/amt-11-3689-2018, 2018. a, b
Mishchenko, M. I., Cairns, B., Hansen, J. E., Travis, L. D., Burg, R., Kaufman, Y. J., Martins, J. V., and Shettle, E. P.: Monitoring of aerosol forcing of climate from space: analysis of measurement requirements, J. Quant. Spectrosc. Ra., 88, 149–161, https://doi.org/10.1016/j.jqsrt.2004.03.030, 2004. a
Moroney, C., Davies, R., and Muller, J.-P.: Operational retrieval of cloud-top heights using MISR data, IEEE T. Geosci. Remote, 40, 1532–1540, https://doi.org/10.1109/tgrs.2002.801150, 2002. a
Morrison, H. and Grabowski, W. W.: Comparison of Bulk and Bin Warm-Rain Microphysics Models Using a Kinematic Framework, J. Atmos. Sci., 64, 2839–2861, https://doi.org/10.1175/jas3980, 2007. a
Pörtge, V., Kölling, T., Weber, A., Volkmer, L., Emde, C., Zinner, T., Forster, L., and Mayer, B.: High-spatial-resolution retrieval of cloud droplet size distribution from polarized observations of the cloudbow, Atmos. Meas. Tech., 16, 645–667, https://doi.org/10.5194/amt-16-645-2023, 2023. a, b, c, d, e, f, g, h, i, j, k, l
Raasch, S. and Schröter, M.: PALM – A large-eddy simulation model performing on massively parallel computers, Meteorol. Z., 10, 363–372, https://doi.org/10.1127/0941-2948/2001/0010-0363, 2001. a, b
Seifert, A. and Beheng, K. D.: A double-moment parameterization for simulating autoconversion, accretion and selfcollection, Atmos. Res., 59–60, 265–281, https://doi.org/10.1016/s0169-8095(01)00126-0, 2001. a, b
Seifert, A. and Beheng, K. D.: A two-moment cloud microphysics parameterization for mixed-phase clouds. Part 1: Model description, Meteorol. Atmos. Phys., 92, 45–66, https://doi.org/10.1007/s00703-005-0112-4, 2006. a, b, c
Seiz, G., Davies, R., and Grün, A.: Stereo cloud-top height retrieval with ASTER and MISR, Int. J. Remote Sens., 27, 1839–1853, https://doi.org/10.1080/01431160500380703, 2006. a, b
Shang, H., Chen, L., Bréon, F. M., Letu, H., Li, S., Wang, Z., and Su, L.: Impact of cloud horizontal inhomogeneity and directional sampling on the retrieval of cloud droplet size by the POLDER instrument, Atmos. Meas. Tech., 8, 4931–4945, https://doi.org/10.5194/amt-8-4931-2015, 2015. a, b, c, d
Shang, H., Chen, L., Letu, H., Li, S., Jia, S., and Wang, Y.: The effect of cloud optical thickness, ground surface albedo and above-cloud absorbing dust layer on the cloudbow structure, in: 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), 10–15 July 2016, Beijing, China, IEEE, https://doi.org/10.1109/igarss.2016.7729561, 2016. a
Sinclair, K., van Diedenhoven, B., Cairns, B., Yorks, J., Wasilewski, A., and McGill, M.: Remote sensing of multiple cloud layer heights using multi-angular measurements, Atmos. Meas. Tech., 10, 2361–2375, https://doi.org/10.5194/amt-10-2361-2017, 2017. a, b
Stevens, B., Ament, F., Bony, S., Crewell, S., Ewald, F., Gross, S., Hansen, A., Hirsch, L., Jacob, M., Kölling, T., Konow, H., Mayer, B., Wendisch, M., Wirth, M., Wolf, K., Bakan, S., Bauer-Pfundstein, M., Brueck, M., Delanoë, J., Ehrlich, A., Farrell, D., Forde, M., Gödde, F., Grob, H., Hagen, M., Jäkel, E., Jansen, F., Klepp, C., Klingebiel, M., Mech, M., Peters, G., Rapp, M., Wing, A. A., and Zinner, T.: A High-Altitude Long-Range Aircraft Configured as a Cloud Observatory: The NARVAL Expeditions, B. Am. Meteorol. Soc., 100, 1061–1077, https://doi.org/10.1175/bams-d-18-0198.1, 2019. a, b
Stevens, B., Bony, S., Farrell, D., Ament, F., Blyth, A., Fairall, C., Karstensen, J., Quinn, P. K., Speich, S., Acquistapace, C., Aemisegger, F., Albright, A. L., Bellenger, H., Bodenschatz, E., Caesar, K.-A., Chewitt-Lucas, R., de Boer, G., Delanoë, J., Denby, L., Ewald, F., Fildier, B., Forde, M., George, G., Gross, S., Hagen, M., Hausold, A., Heywood, K. J., Hirsch, L., Jacob, M., Jansen, F., Kinne, S., Klocke, D., Kölling, T., Konow, H., Lothon, M., Mohr, W., Naumann, A. K., Nuijens, L., Olivier, L., Pincus, R., Pöhlker, M., Reverdin, G., Roberts, G., Schnitt, S., Schulz, H., Siebesma, A. P., Stephan, C. C., Sullivan, P., Touzé-Peiffer, L., Vial, J., Vogel, R., Zuidema, P., Alexander, N., Alves, L., Arixi, S., Asmath, H., Bagheri, G., Baier, K., Bailey, A., Baranowski, D., Baron, A., Barrau, S., Barrett, P. A., Batier, F., Behrendt, A., Bendinger, A., Beucher, F., Bigorre, S., Blades, E., Blossey, P., Bock, O., Böing, S., Bosser, P., Bourras, D., Bouruet-Aubertot, P., Bower, K., Branellec, P., Branger, H., Brennek, M., Brewer, A., Brilouet, P.-E., Brügmann, B., Buehler, S. A., Burke, E., Burton, R., Calmer, R., Canonici, J.-C., Carton, X., Cato Jr., G., Charles, J. A., Chazette, P., Chen, Y., Chilinski, M. T., Choularton, T., Chuang, P., Clarke, S., Coe, H., Cornet, C., Coutris, P., Couvreux, F., Crewell, S., Cronin, T., Cui, Z., Cuypers, Y., Daley, A., Damerell, G. M., Dauhut, T., Deneke, H., Desbios, J.-P., Dörner, S., Donner, S., Douet, V., Drushka, K., Dütsch, M., Ehrlich, A., Emanuel, K., Emmanouilidis, A., Etienne, J.-C., Etienne-Leblanc, S., Faure, G., Feingold, G., Ferrero, L., Fix, A., Flamant, C., Flatau, P. J., Foltz, G. R., Forster, L., Furtuna, I., Gadian, A., Galewsky, J., Gallagher, M., Gallimore, P., Gaston, C., Gentemann, C., Geyskens, N., Giez, A., Gollop, J., Gouirand, I., Gourbeyre, C., de Graaf, D., de Groot, G. E., Grosz, R., Güttler, J., Gutleben, M., Hall, K., Harris, G., Helfer, K. C., Henze, D., Herbert, C., Holanda, B., Ibanez-Landeta, A., Intrieri, J., Iyer, S., Julien, F., Kalesse, H., Kazil, J., Kellman, A., Kidane, A. T., Kirchner, U., Klingebiel, M., Körner, M., Kremper, L. A., Kretzschmar, J., Krüger, O., Kumala, W., Kurz, A., L'Hégaret, P., Labaste, M., Lachlan-Cope, T., Laing, A., Landschützer, P., Lang, T., Lange, D., Lange, I., Laplace, C., Lavik, G., Laxenaire, R., Le Bihan, C., Leandro, M., Lefevre, N., Lena, M., Lenschow, D., Li, Q., Lloyd, G., Los, S., Losi, N., Lovell, O., Luneau, C., Makuch, P., Malinowski, S., Manta, G., Marinou, E., Marsden, N., Masson, S., Maury, N., Mayer, B., Mayers-Als, M., Mazel, C., McGeary, W., McWilliams, J. C., Mech, M., Mehlmann, M., Meroni, A. N., Mieslinger, T., Minikin, A., Minnett, P., Möller, G., Morfa Avalos, Y., Muller, C., Musat, I., Napoli, A., Neuberger, A., Noisel, C., Noone, D., Nordsiek, F., Nowak, J. L., Oswald, L., Parker, D. J., Peck, C., Person, R., Philippi, M., Plueddemann, A., Pöhlker, C., Pörtge, V., Pöschl, U., Pologne, L., Posyniak, M., Prange, M., Quiñones Meléndez, E., Radtke, J., Ramage, K., Reimann, J., Renault, L., Reus, K., Reyes, A., Ribbe, J., Ringel, M., Ritschel, M., Rocha, C. B., Rochetin, N., Röttenbacher, J., Rollo, C., Royer, H., Sadoulet, P., Saffin, L., Sandiford, S., Sandu, I., Schäfer, M., Schemann, V., Schirmacher, I., Schlenczek, O., Schmidt, J., Schröder, M., Schwarzenboeck, A., Sealy, A., Senff, C. J., Serikov, I., Shohan, S., Siddle, E., Smirnov, A., Späth, F., Spooner, B., Stolla, M. K., Szkółka, W., de Szoeke, S. P., Tarot, S., Tetoni, E., Thompson, E., Thomson, J., Tomassini, L., Totems, J., Ubele, A. A., Villiger, L., von Arx, J., Wagner, T., Walther, A., Webber, B., Wendisch, M., Whitehall, S., Wiltshire, A., Wing, A. A., Wirth, M., Wiskandt, J., Wolf, K., Worbes, L., Wright, E., Wulfmeyer, V., Young, S., Zhang, C., Zhang, D., Ziemen, F., Zinner, T., and Zöger, M.: EUREC4A, Earth Syst. Sci. Data, 13, 4067–4119, https://doi.org/10.5194/essd-13-4067-2021, 2021. a
Weber, A., Kölling, T., Pörtge, V., Baumgartner, A., Rammeloo, C., Zinner, T., and Mayer, B.: Polarization upgrade of specMACS: calibration and characterization of the 2D RGB polarization-resolving cameras, Atmos. Meas. Tech., 17, 1419–1439, https://doi.org/10.5194/amt-17-1419-2024, 2024. a, b
Wendisch, M., Macke, A., Ehrlich, A., Lüpkes, C., Mech, M., Chechin, D., Dethloff, K., Velasco, C. B., Bozem, H., Brückner, M., Clemen, H.-C., Crewell, S., Donth, T., Dupuy, R., Ebell, K., Egerer, U., Engelmann, R., Engler, C., Eppers, O., Gehrmann, M., Gong, X., Gottschalk, M., Gourbeyre, C., Griesche, H., Hartmann, J., Hartmann, M., Heinold, B., Herber, A., Herrmann, H., Heygster, G., Hoor, P., Jafariserajehlou, S., Jäkel, E., Järvinen, E., Jourdan, O., Kästner, U., Kecorius, S., Knudsen, E. M., Köllner, F., Kretzschmar, J., Lelli, L., Leroy, D., Maturilli, M., Mei, L., Mertes, S., Mioche, G., Neuber, R., Nicolaus, M., Nomokonova, T., Notholt, J., Palm, M., van Pinxteren, M., Quaas, J., Richter, P., Ruiz-Donoso, E., Schäfer, M., Schmieder, K., Schnaiter, M., Schneider, J., Schwarzenböck, A., Seifert, P., Shupe, M. D., Siebert, H., Spreen, G., Stapf, J., Stratmann, F., Vogl, T., Welti, A., Wex, H., Wiedensohler, A., Zanatta, M., and Zeppenfeld, S.: The Arctic Cloud Puzzle: Using ACLOUD/PASCAL Multiplatform Observations to Unravel the Role of Clouds and Aerosol Particles in Arctic Amplification, B. Am. Meteorol. Soc., 100, 841–871, https://doi.org/10.1175/bams-d-18-0072.1, 2019. a
Wiscombe, W. J.: Improved Mie scattering algorithms, Appl. Optics, 19, 1505–1509, https://doi.org/10.1364/AO.19.001505, 1980. a
Xu, F., Harten, G., Diner, D. J., Davis, A. B., Seidel, F. C., Rheingans, B., Tosca, M., Alexandrov, M. D., Cairns, B., Ferrare, R. A., Burton, S. P., Fenn, M. A., Hostetler, C. A., Wood, R., and Redemann, J.: Coupled Retrieval of Liquid Water Cloud and Above-Cloud Aerosol Properties Using the Airborne Multiangle SpectroPolarimetric Imager (AirMSPI), J. Geophys. Res.-Atmos., 123, 3175–3204, https://doi.org/10.1002/2017jd027926, 2018. a
- Abstract
- Introduction
- Cloud data from LESs with PALM
- 3-D radiative transfer simulations
- Comparison of simulations to measurements
- Comparison of retrieval results to model data
- Conclusions
- Data availability
- Author contributions
- Competing interests
- Disclaimer
- Acknowledgements
- Financial support
- Review statement
- References
- Abstract
- Introduction
- Cloud data from LESs with PALM
- 3-D radiative transfer simulations
- Comparison of simulations to measurements
- Comparison of retrieval results to model data
- Conclusions
- Data availability
- Author contributions
- Competing interests
- Disclaimer
- Acknowledgements
- Financial support
- Review statement
- References