the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 09 Feb 2024
| 09 Feb 2024
Artificial intelligence (AI)-derived 3D cloud tomography from geostationary 2D satellite data
Sarah Brüning
Stefan Niebler
Satellite instruments provide high-temporal-resolution data on a global scale, but extracting 3D information from current instruments remains a challenge. Most observational data are two-dimensional (2D), offering either cloud top information or vertical profiles. We trained a neural network (Res-UNet) to merge high-resolution satellite images from the Meteosat Second Generation (MSG) Spinning Enhanced Visible and InfraRed Imager (SEVIRI) with 2D CloudSat radar reflectivities to generate 3D cloud structures. The Res-UNet extrapolates the 2D reflectivities across the full disk of MSG SEVIRI, enabling a reconstruction of the cloud intensity, height, and shape in three dimensions. The imbalance between cloudy and clear-sky CloudSat profiles results in an overestimation of cloud-free pixels. Our root mean square error (RMSE) accounts for 2.99 dBZ. This corresponds to 6.6 % error on a reflectivity scale between −25 and 20 dBZ. While the model aligns well with CloudSat data, it simplifies multi-level and mesoscale clouds in particular. Despite these limitations, the results can bridge data gaps and support research in climate science such as the analysis of deep convection over time and space.
- Article
(6568 KB) - Full-text XML
- BibTeX
- EndNote





Clouds and their interdependent feedback mechanisms have been a source of uncertainty in Earth system models for decades. Their influence on atmospheric gases and general circulation patterns is evident (Rasp et al., 2018; Shepherd, 2014; Bony et al., 2015). In a world affected by climate change, we require an accurate representation of cloud dynamics today more than ever (Norris et al., 2016; Stevens and Bony, 2013; Vial et al., 2013).
In recent years, observational data from remote sensing instruments have been used to investigate cloud properties on multiple scales (Jeppesen et al., 2019). Nevertheless, techniques to detect three-dimensional (3D) cloud structures on a large scale are not yet established (Bocquet et al., 2015). Observations from passive sensors on geostationary satellites have a high spatiotemporal coverage, but they are limited to monitoring the uppermost atmospheric layer in 2D (Noh et al., 2022). By using the satellite's specificity at different wavelengths (Thies and Bendix, 2011) and subjective labeling or fixed thresholds (Platnick et al., 2017), we can estimate cloud physical properties like the cloud optical thickness (Henken et al., 2011) or the effective radius (Chen et al., 2020). In contrast, active radar penetrates the cloud top and delivers information on the subjacent reflectivity distribution (Barker et al., 2011). The radar receives detailed information on the cloud column along a 2D cross section with a high ground resolution and constant sun illumination. Due to its sun-synchronous orbit, it observes the same spot at the same local time. Compared to geostationary satellites, the active radar does not provide a continuous spatial and temporal coverage (Wang et al., 2023). Passive sensors can be used to deliver an approximation of the cloud vertical column, but their information density is reduced compared to active sensors (Noh et al., 2022). Combining data sources can fill current data gaps (Amato et al., 2020; Steiner et al., 1995). The combined use of different instruments has been investigated before. This research comprises the usage of statistical algorithms (Miller et al., 2014; Seiz and Davies, 2006; Noh et al., 2022), the integration of radiative transfer approaches (Forster et al., 2021; Zhang et al., 2012), or the derivation of the multi-angle geometry of neighboring clouds (Barker et al., 2011; Ham et al., 2015) to reconstruct the cloud vertical column.
Emerging facilitators of data availability, like open-data policies and improved technological standards, enable effective processing of memory-consuming data (Irrgang et al., 2021; Rasp et al., 2018). This development promotes a further integration of computer science methods in climate science (Jeppesen et al., 2019; Liu et al., 2016). Ever-growing quantities of data surpass the capability of the human mind to extract explainable information efficiently (Lee et al., 2021; Karpatne et al., 2019). Here, the usage of artificial intelligence (AI) has been assigned a primary role (Runge et al., 2019). Cloud properties have been analyzed before by machine-learning (ML) algorithms (Reichstein et al., 2019; Marais et al., 2020). The recent technological advances enable unprecedented operations (Amato et al., 2020). Deep-learning (DL)-based networks are suitable for identifying spatial, spectral, and temporal patterns in big data (Jeppesen et al., 2019; Hilburn et al., 2020). In contrast to traditional ML frameworks, they do not require manual feature engineering (Le Goff et al., 2017). Adapting DL frameworks to applications in climate science offers new perspectives for a gain in knowledge (Rolnick et al., 2022; Jones, 2017).
So far, cloud properties have been investigated by DL algorithms in various applications. These comprise the detection (Drönner et al., 2018) and segmentation of cloud fields (Jeppesen et al., 2019; Lee et al., 2021; Le Goff et al., 2017; Tarrio et al., 2020; Cintineo et al., 2020) or the classification of distinct cloud types from meteorological satellites and aerial imagery (Marais et al., 2020; Wang et al., 2023). Zantedeschi et al. (2022) used a neural network to bring together information from an active radar and high-resolution satellite images to reconstruct cloud labels. Regressive models were used to predict rain rates (Han et al., 2022) or convective onset (Pan et al., 2021) for an improved weather forecast. These studies are often limited to reflecting horizontal processes within the cloud field. Current studies by Hilburn et al. (2020) and Leinonen et al. (2019) use AI techniques such as convolutional neural networks (CNNs) and conditional generative adversarial networks (CGANs) to address this issue. They reconstruct the 1D cloud column (Hilburn et al., 2020) or the 2D cross section of the input data (Wang et al., 2023). To the best of our knowledge, no extrapolation of 2D radar data to a large-scale 3D perspective was conducted before (Wang et al., 2023; Dubovik et al., 2021). Clouds move within a 3D space. This limits the prediction of multi-layer and mesoscale events by a 1D or 2D pixel-wise reconstruction (Hilburn et al., 2020). Models that do not consider the spatial coherence between pixels fail to reconstruct comprehensive cloud structures (Hu et al., 2021). Image segmentation approaches like the UNet (Ronneberger et al., 2015; Jiao et al., 2020; Wieland et al., 2019) may reconstruct the ground truth data more adequately. They can be used to provide the indicators for predicting clouds in 3D with their adjacent boundaries, shadow locations, and geometries (Wang et al., 2023). This can lead to a more realistic representation of the predicted clouds (Jiao et al., 2020).
In this study, we employ a modified Res-UNet (Diakogiannis et al., 2020; Hu et al., 2021) to integrate 2D data from active (polar-orbiting satellite, radar) and passive (geostationary satellite, spectrometer) instruments to reconstruct a 3D cloud field. Previous studies focused on reconstructing the 1D cloud column or 2D cross section. In contrast, our approach utilizes a DL framework to predict the radar reflectivity, not only along the radar cross section, but also across the entire satellite full disk (FD). We use the radar height levels to extend 2D satellite channels to a 3D perspective. The goal is to establish a spatiotemporally consistent cloud tomography solely based on observational data. Predicted reflectivities can enhance the availability of 3D resolved cloud structures, particularly in regions with limited data.
2.1 Data overview
Our approach uses observational data from two different remote sensing sensors to predict a 3D cloud tomography. The input data for the neural network originate from a geostationary satellite. We use data from the European Organisation for the Exploitation of Meteorological Satellites (EUMETSAT) Spinning Enhanced Visible and InfraRed Imager (SEVIRI) instrument on the Meteosat Second Generation (MSG) satellite (EUMETSAT Data Services, 2023). This sensor observes the Earth from a height of 36 000 km and provides 2D satellite images at a high spatial and temporal resolution. The ground truth of the study is derived from an active radar on board the CloudSat satellite which moves in a sun-synchronous orbit (CloudSat Data Processing Center, 2023). The 2D profiles along the track contain information on the cloud reflectivity. In our study, we feed the MSG SEVIRI data into a neural network to reconstruct the CloudSat radar reflectivity and extrapolate the 2D profiles to a 3D perspective.
2.1.1 Geostationary satellite images
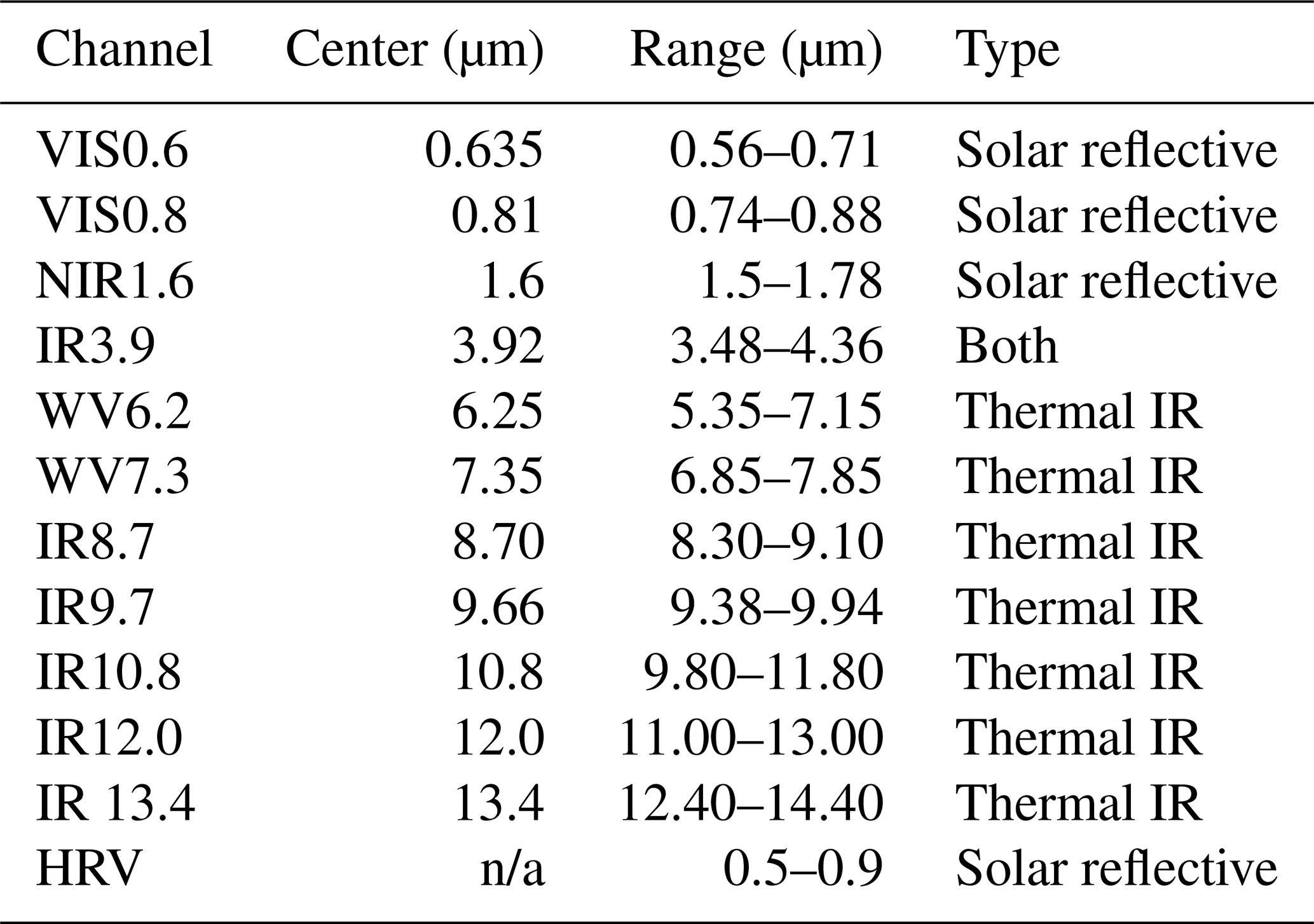
Satellite images from the MSG SEVIRI instrument display the input for the network (later referred to as “imager data”) (Schmetz et al., 2002). Observing the Earth's surface in intervals of 15 min and with a spatial resolution of 3 km at nadir, MSG SEVIRI provides information in 12 channels centered within wavelengths from 0.6 to 132 µm (Benas et al., 2017). Depending on the wavelength and daytime of retrieval, the channels are sensitive to reflected solar radiation or surface emissions (Table 1). They can be applied to approximate cloud physical properties (Sieglaff et al., 2013). Our approach uses 11 channels. The high-resolution visible (HRV) channel is excluded due to its different resolution and uncertain added value. Three of the channels are sensitive to solar radiation, which restricts us to using only daytime data. We reformat all imager data onto a spatial grid with geographic coordinates, employing the global reference system WGS84 (Drönner et al., 2018). Each pixel has a resolution of 0.03∘ in both width (W) and height (H). To account for diminishing accuracy from the Equator to the poles, we exclude the areas near the sensor boundaries (Bedka et al., 2010). The designated area of interest (AOI) extends 60∘ in all directions, marking the boundaries of the new FD.
Table 1Overview of the MSG SEVIRI channels (Schmetz et al., 2002). “n/a” stands for “not available”.
2.1.2 Radar data
Within the CloudSat (CS) GEOPROF-2B product, a nadir-looking 94 GHz cloud profiling radar (CPR) delivers information on the cloud reflectivity on the logarithmic dBZ (decibel relative to Z) scale (later referred to as “radar data”) (Stephens et al., 2008). The radar receives a 2D cross section of the cloud column with a horizontal resolution of 1.1 km. The vertical dimension (Z) comprises 125 height levels with a bin size of 240 m (Guillaume et al., 2018). From the ground surface to the lower stratosphere, the vertical extent covers 30 km. We use the reflectivity transects as the ground truth to train and evaluate the model. In the subsequent steps, we adjust the height levels of the radar. The lower altitudes, specifically those between 0 and 3 km, are influenced by the topography and a radar signal weakening due to attenuation (Marchand et al., 2008). To enhance the model performance, we omit the 10 lowest height levels. Since we notice a significant imbalance between clear-sky and cloudy pixels, we exclude the predominantly cloud-free areas within the upper 25 height levels (Stephens et al., 2008). The final Z dimension encompasses 90 height levels ranging from 2.4 to 24 km. We note that, due to the sun-synchronous orbit of CloudSat, it has a reduced ability to account for diurnal variations within specific regions of the AOI (Stephens et al., 2008).
2.1.3 Matching scheme
We obtain training data for our study by aligning MSG SEVIRI scenes with CloudSat radar data as shown in Fig. 1a. To match the datasets, we compare their timestamps and locations. If the radar coordinates fall within the AOI, we determine the flight direction to identify whether CloudSat circles the Earth in ascending or descending orbit. We then extract images of 128×128 (H×W) pixels from each MSG SEVIRI channel along the radar coordinates using a moving-window approach with a 50 % overlap between image–profile pairs (Denby, 2020; Jeppesen et al., 2019).
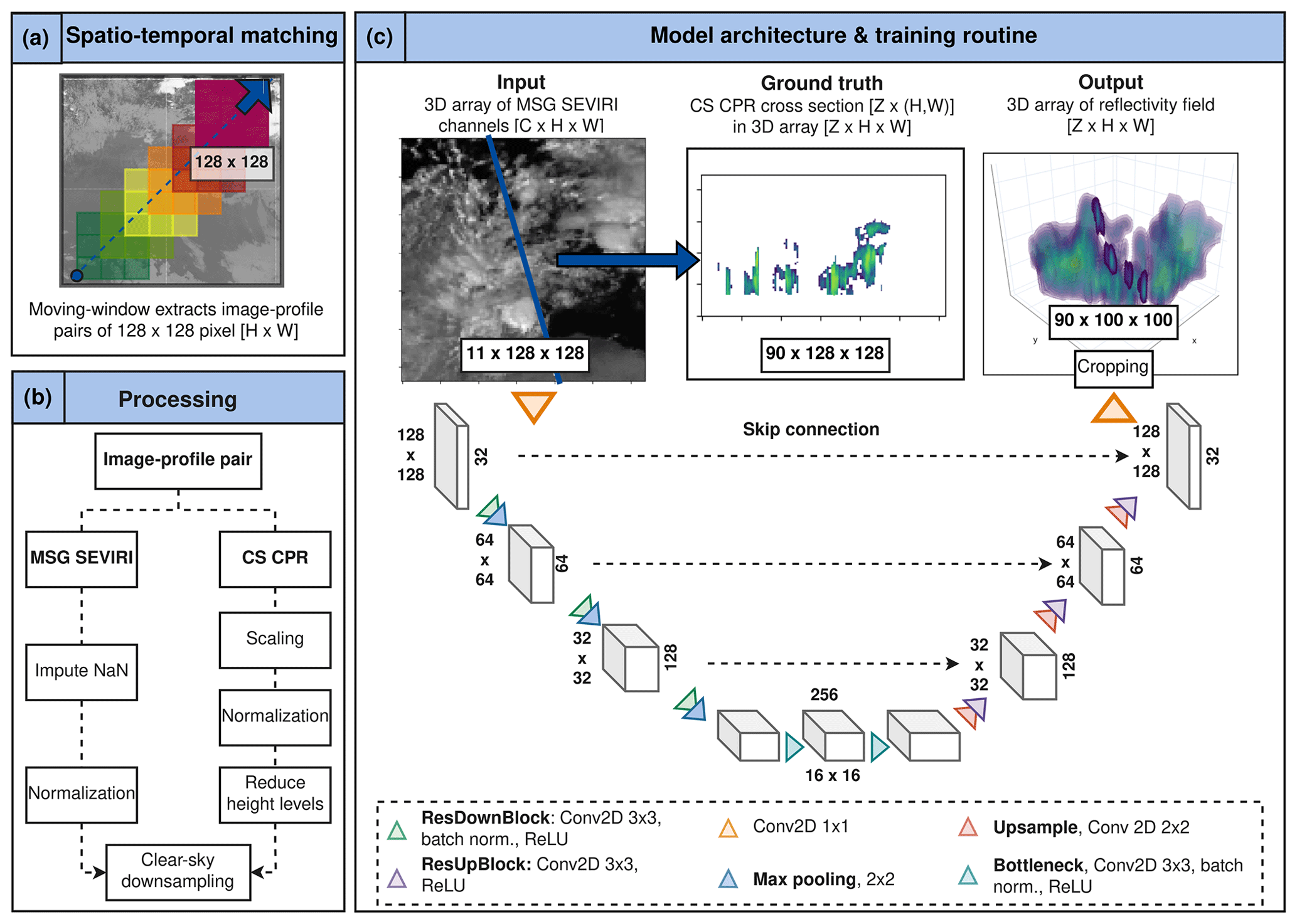
Figure 1Workflow of the study. Panel (a) shows the moving-window approach used for matching the radar and the imager data. Steps needed for the processing of both datasets are depicted in panel (b). In panel (c), the architecture of the proposed Res-UNet is illustrated. The upper row shows an example of the input data, ground truth (with reduced 90 height levels and full transparency for values dBZ), and output, respectively. The location of the radar transect within the 3D output image is pictured with full opacity. The numbers alongside the boxes in the architecture sketch refer to the feature channels (right) and image sizes (left) at the given model depth.
We prepare the matched image–profile pairs for further processing. To do this, we combine the 11 MSG SEVIRI channels into a single 3D array with dimensions [] pixels. CloudSat flies across a horizontal transect within the satellite scene. It has a higher native resolution than MSG SEVIRI. To align the datasets, we downsample the radar pixels by aggregating them based on the local maximum reflectivity. This adjusts the CloudSat pixels to the MSG SEVIRI resolution of 0.03∘ but leads to some loss of sharp contrast in radar pixels (Jordahl et al., 2020). We standardize the data shape by transforming the 2D cross section into a sparse 3D array of [] pixels, representing reflectivities along the cross section. After downsampling, the transect becomes 1 pixel wide. We label pixels outside the transect as missing values to maintain the CloudSat data location during training. We use these pixel indices to compute the loss between the CloudSat data and the predicted cross section and to evaluate the model performance.
2.1.4 Data processing
Before training the model, we process the extracted image–profile pairs. We utilize a full year of data (2017) to incorporate seasonal variations into the modeling process. We split the 30 000 matched image–profile pairs, with 75 % (January to September) used for training and 25 % (October to December) for validation. Our test set is derived from data in May 2016, from which the matching algorithm extracts 1500 image–profile pairs. We impute missing data in the 3D MSG SEVIRI array by an interpolation of neighboring pixels (Troyanskaya et al., 2001). Afterwards, data from each satellite channel x were normalized between [0,1] by
using the arithmetic mean μ and standard deviation σ of the training data (Leinonen et al., 2019). As described in Sect. 2.1.2, we reduce the height levels of the CloudSat profile from 125 to 90 (Fig. 1b). We use the CloudSat quality index to identify noisy pixels. Pixels with a quality index lower than 6 were set to a background value of −25 dBZ to reduce noise (Marchand et al., 2008). All radar reflectivity values ZdB were normalized between as follows:
where the maximum and minimum reflectivities are between (Stephens et al., 2008; Leinonen et al., 2019). The CloudSat data are highly skewed towards clear-sky samples. We limit the percentage of cloud-free profiles to 10 % to tackle this imbalance (Jeppesen et al., 2019).
2.2 Model architecture and training
Neural networks can capture highly complex relationships between input and output data (Lee et al., 2021). The Res-UNet used in this study displays a modified framework designed for remote sensing data (Dixit et al., 2021). Additional residual connections and continuous pooling operations aim to reduce the dependence of the network on the input's location (Diakogiannis et al., 2020). Former studies using the Res-UNet dealt with the classification of tree species (Cao and Zhang, 2020) or the prediction of precipitation (Zhang et al., 2023). The obtained results emphasize the ability of the Res-UNet to adequately address the importance of the spatial coherence in environmental research (Marais et al., 2020). In this study, we derive the cloud reflectivities (dBZ) from the satellite channels by a regression task (Hilburn et al., 2020; Zhang et al., 2023).
As introduced by Ronneberger et al. (2015), the UNet and its modifications provide an almost symmetrical architecture. The network architecture of the Res-UNet is shown in Fig. 1c. The parameters of the network are listed in Table A1 in Appendix A. Each box represents the layer sizes on the encoder and decoder sides. On the right-hand side of each box, the filter size is given. The respective height and width are given on the left-hand side.
The Res-UNet consists of six residual blocks, each including two 2D convolutions (3×3 kernel, stride 1) and rectified linear unit (ReLU) activation (Diakogiannis et al., 2020). On the encoder side, we add batch normalization. The output is merged with a skip connection that consists of one 2D convolution (3×3 kernel, stride 1) and a batch normalization. Adding the skip connection and the convolutional layer represents the output of a residual block.
We increase the channel dimension of the initial imager data from pixels with a 1×1 2D convolution to a feature map of size . In the encoder branch, we then employ a sequence of three residual blocks with doubling filter sizes, each followed by a 2×2 maximum pooling layer (Lee et al., 2021). We subsequently reduce the feature map size to pixels in the bottleneck layer. Here, we apply two 2D convolution layers, followed by batch normalization and ReLU activation.
The decoder side features three residual blocks, each with an upsampling layer (2D convolution, 2×2 kernel, stride 2) and a corresponding skip connection from the encoder. After upsampling, we apply a residual block with 2D convolution (3×3 kernel, stride 1) and ReLU activation, doubling the spatial extent to match the skip connection while halving the channel dimension (Li et al., 2018). The final 1×1 convolution maps the output to pixels, representing the 90 height levels of the radar cross section (Jeppesen et al., 2019). We remove the border pixels of the output, resulting in a final radar reflectivity output of pixels (). Predicted reflectivities are scaled between −35 and 20 dBZ, with values below −25 dBZ considered cloud-free (Leinonen et al., 2019).
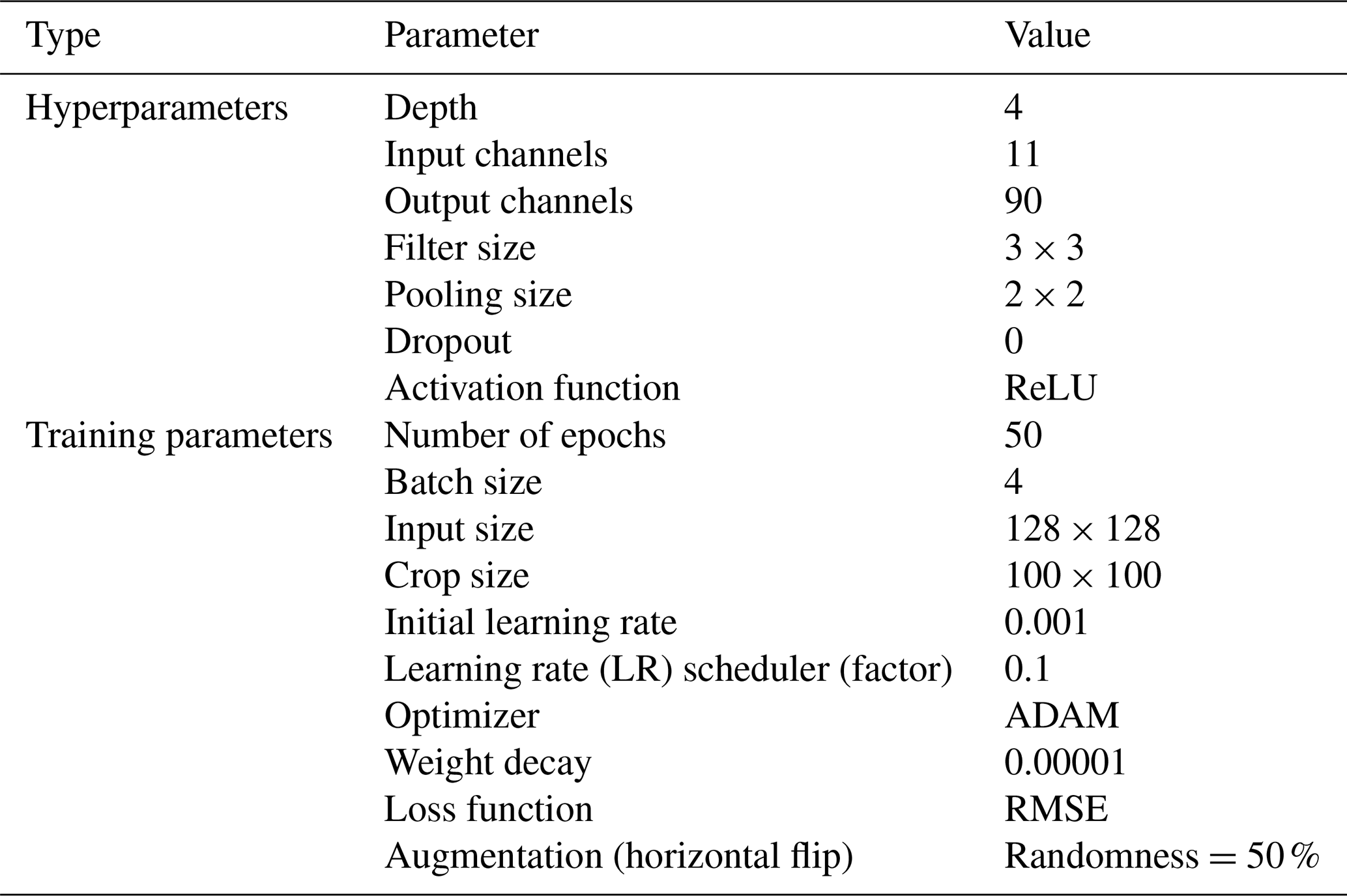
We conducted the training for 50 epochs with a batch size of 4 and a weight decay of 0.00001 (see Table A1 in Appendix A). We have 1 893 328 total trainable parameters. The estimated total size of the model is 194.27 MB (see Table B1 in Appendix B). We use the adaptive moment estimation (ADAM) method for model optimization due to its fast convergence rate (Kingma and Ba, 2014). The learning rate is initially set to 0.001 (see Table A1 in Appendix A). It is reduced by a learning rate scheduler during the training process when reaching a plateau. To enhance the number of training data, we give all input data a chance of 25 % of being rotated by 90∘ (Jeppesen et al., 2019). These flipped images are perceived as new samples. The goal is to increase the model invariance to the orientation of the radar cross section.
2.3 Evaluation
2.3.1 Analyzing and comparing the model performance
The model performance is quantified during training (loss function) and is evaluated afterwards by calculating the root mean square error (RMSE) (see Table A1 in Appendix A). The RMSE is equally able to penalize misses and false alarms (Lee et al., 2021). As described in Sect. 2.1.3, we preserve the pixel indices of the CloudSat cross section within each image–profile pair during training. We use the locations of these pixels to filter the observed and predicted transects. The RMSE is calculated along the filtered cross sections. Since it is only evaluated on a small subset of 10 % of all the pixels, we have a sparse regression task (Wang et al., 2020). We cannot quantify the model performance on the full 3D prediction of the cloud field.
The results of the Res-UNet are compared against two competitive methods (Drönner et al., 2018). First, we predict the radar reflectivity by an ordinary least squares model with multiple regression outputs (OLS). The 11 satellite channels were used as independent predictor variables. The output is a 1D cloud column. Second, a random-forest (RF) regression is applied (Breiman, 2001). The RF is a supervised ML algorithm suitable when working with environmental datasets in the natural sciences (Boulesteix et al., 2012). Its feasibility for complex meteorological data was investigated before. For example, McCandless and Jiménez (2020) used a RF regression to detect clouds. Our study uses a setup with 100 trees, each choosing a random subset of satellite channels to predict the reflectivity along a 1D cloud column. We use the same training, validation, and test split as for the Res-UNet. For each image–profile pair, we filter the 3D array to locate the radar cross section. This transect is separated into 1D cloud columns. For every pixel along the cross section, we receive a ground truth in the form of 90×1 []. The 3D array containing the satellite channels was filtered by the radar profile location and was divided into images of size 11×1 []. The OLS and RF map the imager data to an output size of 90×1 pixels []. We calculate the RMSE between the observed and predicted cloud columns and scale the output between −35 and 20 dBZ. We reconstruct the 2D transect by the preserved index of each pixel of the cross section. These profiles are compared to the output of the Res-UNet.
2.3.2 Merging 3D reflectivities on the FD
We predict the radar reflectivity for each MSG SEVIRI file in the test dataset (May 2016) using the trained Res-UNet. The result is a contiguous 3D cloud tomography for every 15 min time step. The MSG SEVIRI FD covers an extent of 2400×2400 pixels. For the FD prediction, we divide the FD into overlapping subsets of 128×128 pixels. These subsets are processed and fed into the network. The output is a 3D reflectivity image of pixels [], which equals 2.5∘ on the MSG SEVIRI grid. We merge the tiles to cover the whole satellite AOI. Between the tiles, there is no overlap. The goal is to evaluate the network's ability to extrapolate a large-scale cloud field from single tiles.
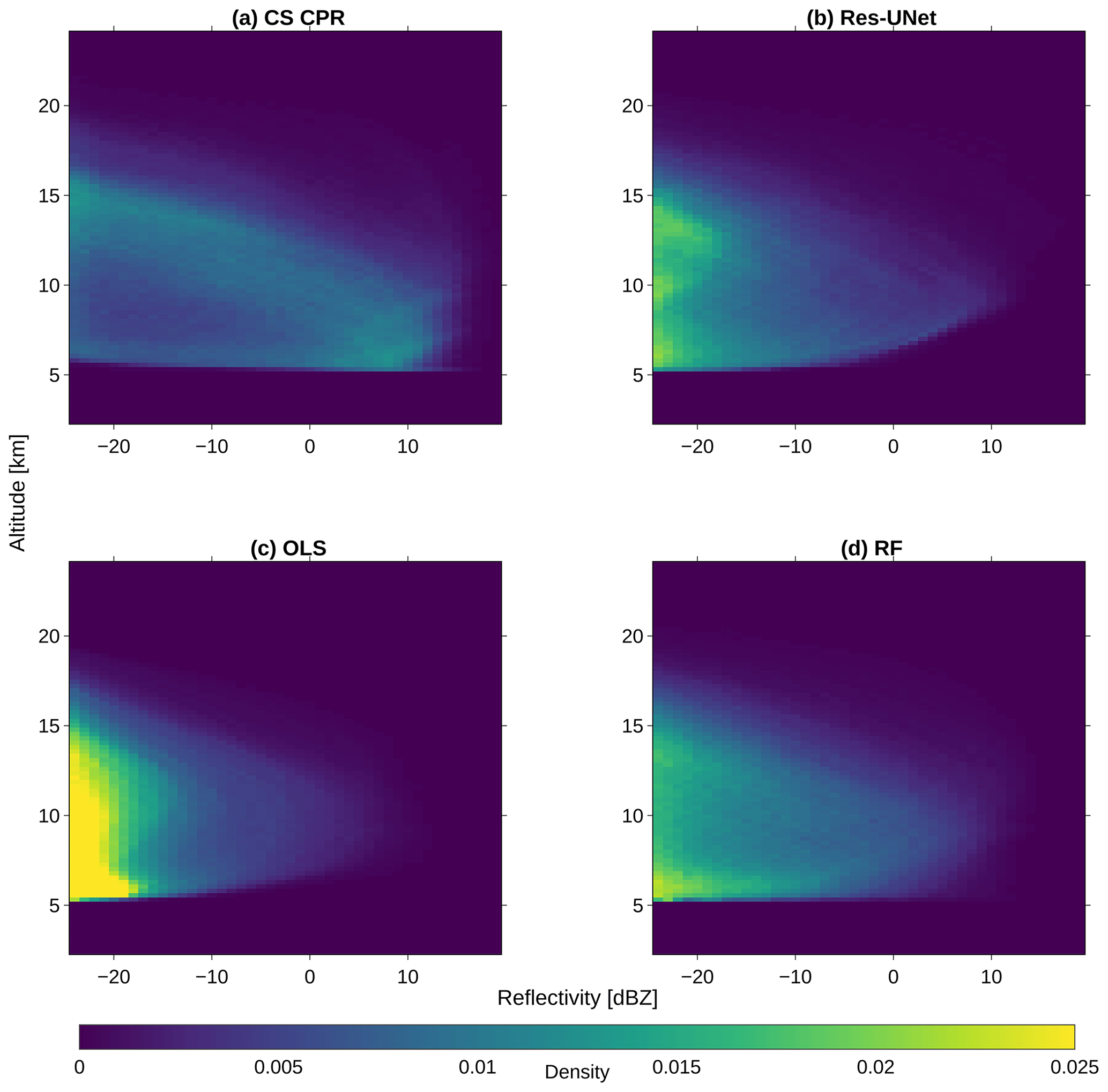
Figure 2Height-dependent reflectivity distribution for every height bin between 2.4 and 24 km for the CloudSat data (CS CPR) (a), the Res-UNet (b), the ordinary least squares model (OLS) (c), and the random-forest (RF) regression (d) (n=1500).
2.3.3 Computing the cloud top properties
To the best of our knowledge, there exist no comparable datasets on the 3D cloud tomography in this study. Instead of a quantitative evaluation of the reflectivity, we evaluate the predictions based on their ability to derive the cloud top height (CTH) (Wang et al., 2023). We use the FD predictions for the test dataset (May 2016) for the computation. The CTH is defined as the distance between the ground surface and the uppermost cloud layer for every 1D vertical column (Huo et al., 2020). This calculation requires conversion of the height levels to a kilometer scale. We use a fixed threshold of −15 dBZ to differentiate a cloudy pixel from a clear-sky pixel (Marchand et al., 2008). The result is a binary classification for each pixel in the 3D cloud field. In this dataset, we extract the CTH as the cloud top signal in each 1D cloud column of the FD. We aggregate the results on a monthly scale and compare the predicted CTH to the operational product CLAAS-V002E1 (CLoud property dAtAset using SEVIRI, Edition 2) (Finkensieper et al., 2020). It is based on the MSG SEVIRI channels and additional model data and provides information on the macrophysical and microphysical cloud properties. We use a monthly aggregate with a resolution of 0.05∘ on the MSG SEVIRI FD.
3.1 Evaluating the reflectivity distribution
We analyze the ability of the three models (Res-UNet, OLS, and RF) to reconstruct the cloud vertical distribution for the test dataset in May 2016 (Sect. 2.3.1). The OLS and RF predict a 1D column, whereas the output of the Res-UNet comprises a 3D image of the cloud field. We filter all outputs by the preserved location of the radar cross sections to derive the original 2D transect. At first, we compute the height-dependent reflectivity distribution of the CloudSat data and the three models. Due to the applied quality flag (Sect. 2.1.4), we have few observations below 5 km height (Fig. 2a). This leads to a shift in low height levels. The models overestimate cloud-free values below −25 dBZ. The CloudSat reflectivities have a peak at 0–10 dBZ between 5 and 7 km. A second, weaker peak is observed between 12 and 15 km for reflectivities <0 dBZ. All the predictions underestimate the first peak >0 dBZ. Instead, they overestimate the occurrence of reflectivities dBZ (Fig. 2b–d). The OLS shows an especially high shift towards low reflectivities. The Res-UNet predicts low reflectivities dBZ along all the height levels between 5 and 15 km, whereas we observe a distinct peak at 5 km for the RF.
We analyze the difference between the observed and predicted reflectivities by a 2D joint distribution plot. For this purpose, we calculate the density distribution of the reflectivity between 2.4 and 24 km. Here, we use a bin size of 1 dBZ and 240 m height, respectively (Steiner et al., 1995). All the distributions are calculated on the test dataset and are normalized by the distribution size (n=1500). Predictions differ from the original radar data, especially for values >0 dBZ and at low altitudes (Fig. 3). In the joint plot, the highest agreement appears in the form of a curved line between low reflectivities >15 km and high reflectivities at 7 km. The results indicate an overestimation of high reflectivities and an underestimation of low reflectivities, especially for low-level clouds. Since we observe few clouds at high altitudes (Fig. 2a), the distribution differences become smaller above 15 km. The joint plot shows a similar distribution for the Res-UNet and the RF, whereas the error of the Res-UNet is slightly lower for reflectivities between −15 and 0 dBZ (Fig. 3a and c). We observe few predictions >0 dBZ and a strong overestimation of reflectivities dBZ for the OLS (Fig. 3b).
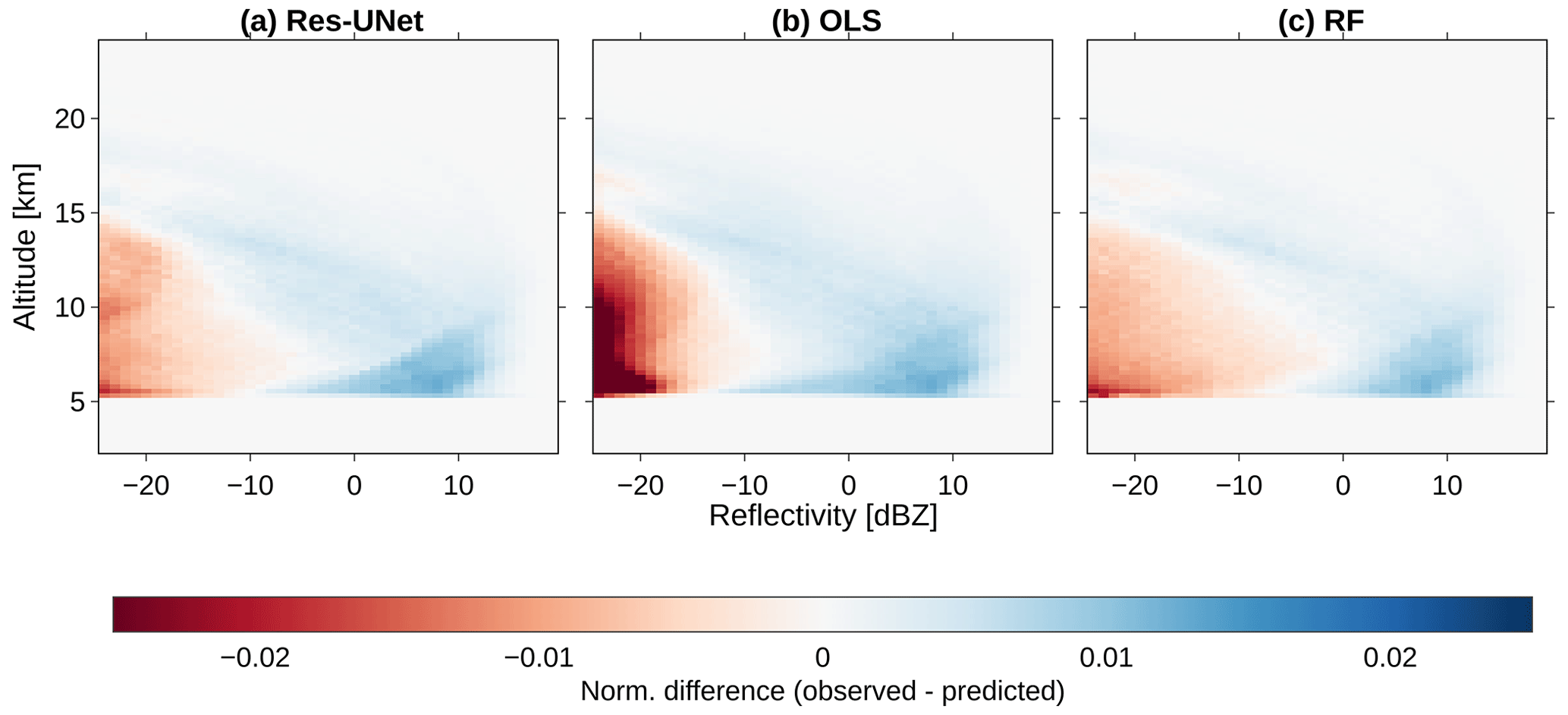
Figure 3Joint plot of the normalized difference between the observed and predicted reflectivities on the test dataset (n=1500). For each height bin between 2.4 and 24 km, we compare the CS CPR to the distribution of the Res-UNet (a), OLS (b), and RF regression (c).
3.2 Height-dependent model performance
We analyze the model error (RMSE) along the vertical cloud column. For all the models, we calculate the mean RMSE on the test dataset between 2.4 and 24 km. The results show an overall lower RMSE for the Res-UNet than for the OLS and RF (Fig. 4). The mean RMSE varies between 2.99 dBZ (Res-UNet), 4.1 dBZ (RF), and 4.58 dBZ (OLS). On a dBZ scale between −25 and 20 dBZ, this is equivalent to errors of 10.1 % (OLS), 9.1 % (RF), or 6.6 % (Res-UNet). Between 2.4 and 5 km, the RMSE is 0. This is due to the lack of CloudSat observations after filtering noisy pixels (Fig. 2a). Between 5 and 7 km, the RMSE increases to up to 8 dBZ for the Res-UNet, 10 dBZ for the RF, and 12 dBZ for the OLS (Fig. 4). At higher altitudes, the performance of all the models improves. The RMSE decreases to 4 dBZ (5.7 dBZ, 6 dBZ) for the Res-UNet (RF, OLS) at 15 km and reaches its minimum at 22 km (24 km for OLS and RF). Above 15 km, we have few CloudSat observations >15 dBZ (Fig. 2a). We observe a lower model error (Fig. 4) and reduced the difference between the distributions (Fig. 3) at these height levels for all three models. The improved performance can be traced back to the superior number of background reflectivities or the presence of more uniform clouds, like extended tropical cirrus. Over all the height levels, the Res-UNet has the lowest RMSE of the three models. Compared to the OLS (RF), the mean RMSE of the Res-UNet is reduced by 34,8 % (27,1 %).
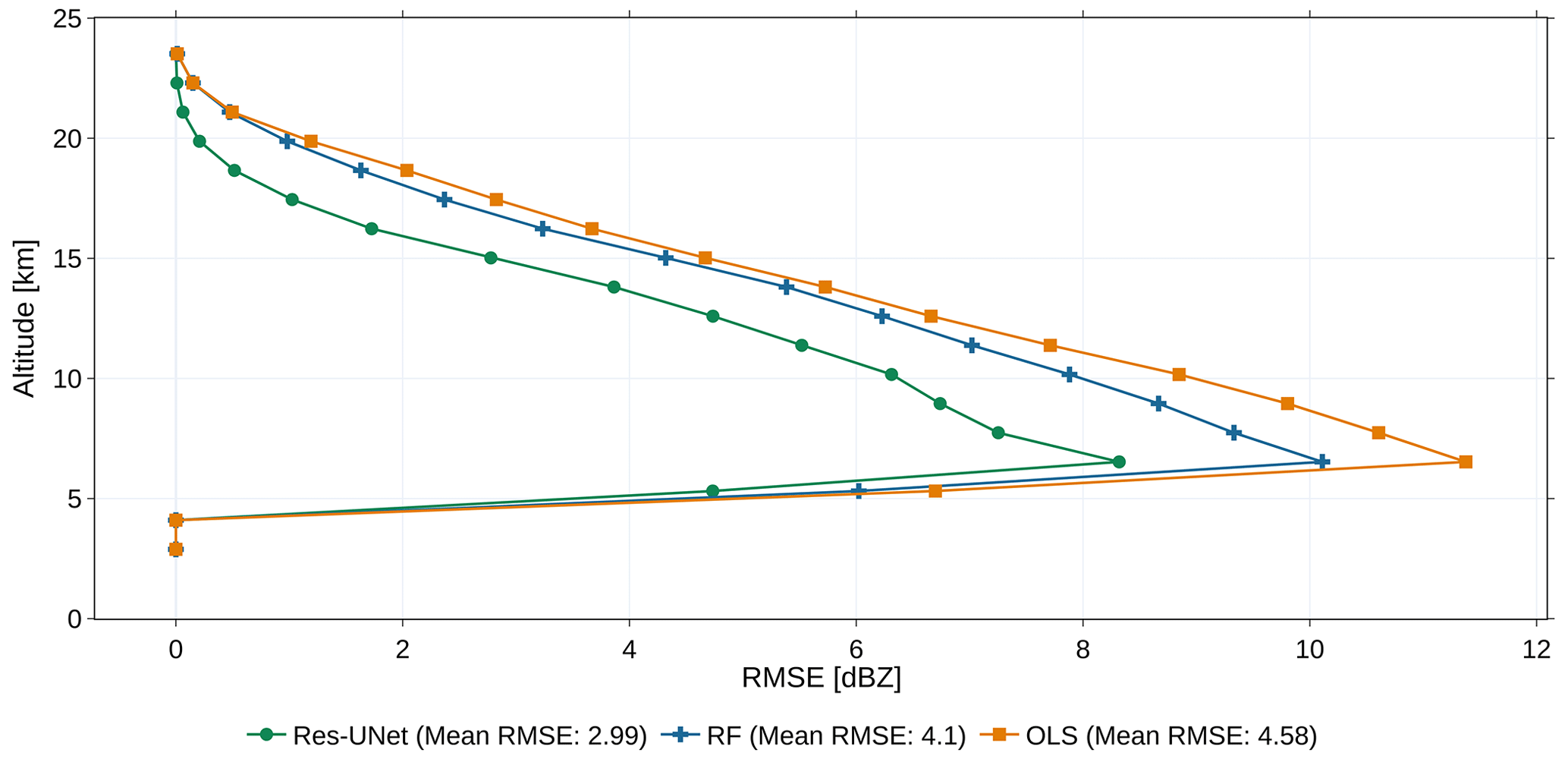
Figure 4Height-dependent RMSE for every height bin and the mean RMSE for all the models calculated on the test dataset (n=1500).
Figure 5 shows the predicted and observed reflectivities along the radar transect for four randomly chosen samples. For all the models, the reconstructed cloud signal is predicted at the right horizontal location along the cross section. Clear-sky situations of −25 dBZ are recognized without noise. The cross sections in Fig. 5a are created using processed CloudSat reflectivities with a resolution of 0.03∘. Although the radar pixels lose some sharp contrasts after the downsampling, we observe a higher blurriness for the predictions. The edges of individual clouds smear out for all three models. Even though all the transects were labeled “cloudy”, we see a high percentage of background pixels.
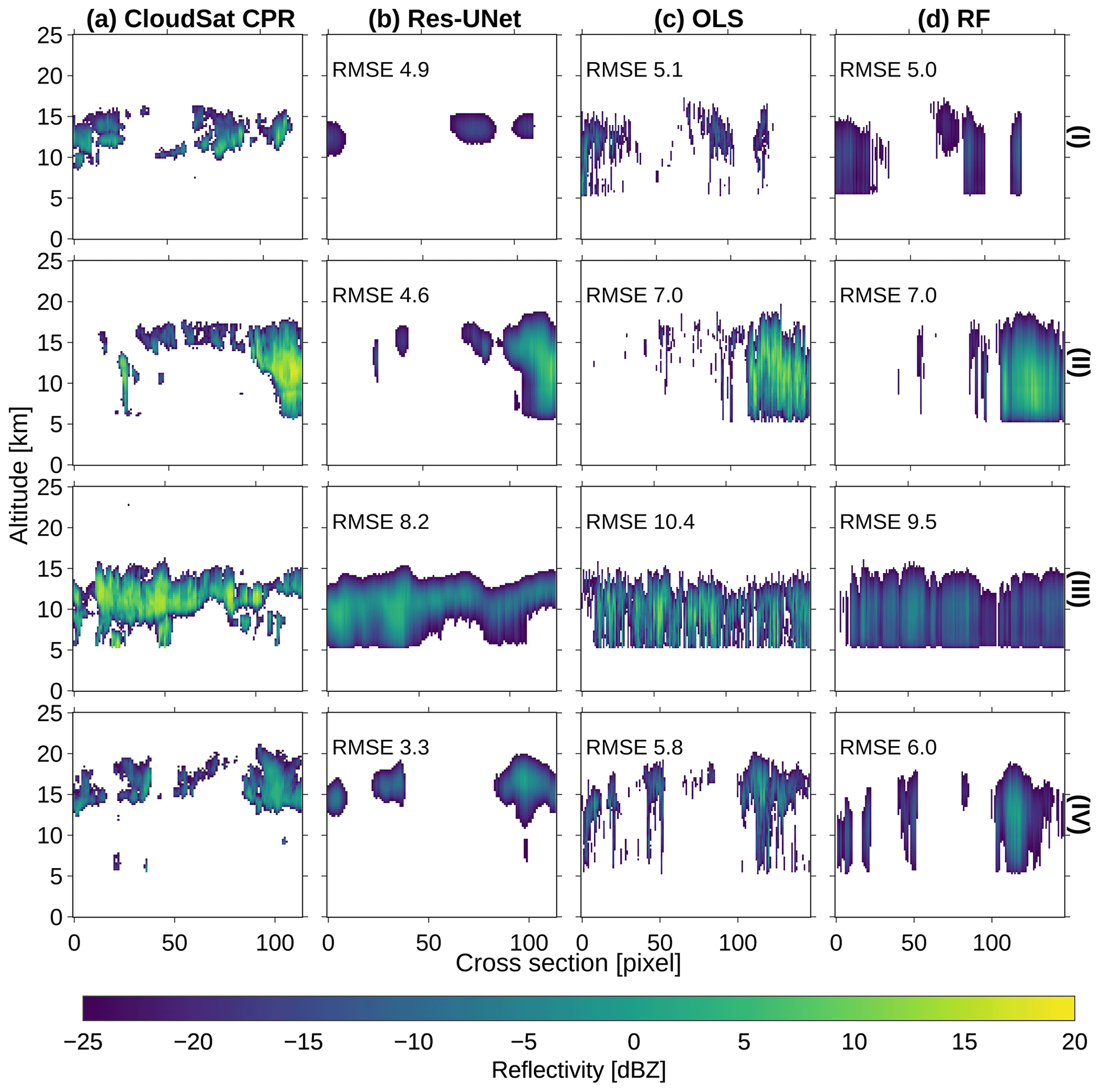
Figure 5Reconstructing the radar cross section for four random examples of the test dataset (n=1500). Values dBZ are displayed transparently. We compare the reflectivity between the processed CloudSat cross sections (a) and the predictions of the Res-UNet (b), OLS (c), and RF (d) for each transect (I)–(IV). The RMSE describes the error between the CloudSat data and the predicted profile.
For the Res-UNet, we observe a RMSE between 3.3 and 8.2 dBZ. The overall shape and increased intensification towards the cloud's core follow the radar, even though edges are blurred, and peak reflectivities remain underestimated (Fig. 5b). This issue is reflected within the reflectivity distribution of the DL model (Fig. 2b). While the Res-UNet accurately identifies single-layer clouds, it misses sharp edges of multi-layer clouds, especially at mid altitudes. Clouds over multiple height levels are blurry and show a reduced small-scale accuracy in the vertical dimension (Fig. 5III). The lower height levels of multi-layer clouds are only partly represented (Fig. 5II and IV). Instead, we observe a simplification of these cloud layers.
For the OLS and the RF, the underestimation of the cloud core reflectivities resembles the Res-UNet (Fig. 5II and III). All four examples show a higher RMSE for the OLS and RF than for the Res-UNet (Fig. 5c and d). The difference varies between 0.1 (I) and 2.7 (IV) dBZ. While the error is predominantly similar for all three models, the shape of the predicted clouds differs (I, III). The OLS (RF) fails to accurately reconstruct the vertical extent in all the transects. Instead, the reflectivity is uniform along the cloud column. We see a continuous cloud signal between 5 and 15 km (Fig. 5c). In contrast, the Res-UNet predicts the vertical variability more precisely (Fig. 5b). While the 2D profiles of the Res-UNet are smooth, the RF and OLS lead to a fragmented structure with a high value variability between the single pixels of the transect (I, IV). The examples show an inaccurate reconstruction of shallow clouds and multi-layer clouds for the OLS and RF.
3.3 Geographic analysis of the 3D cloud tomography
With the trained Res-UNet, we predict clouds on the MSG SEVIRI AOI. Since the network was trained using visible-spectrum (VIS) channels, we cannot provide an accurate representation of the nocturnal cloud field. An exemplary 3D cloud tomography is predicted for 6 May 2016 at 13:00 UTC. For that purpose, the satellite scene was divided into small subsets of overlapping 128×128 pixel images as described in Sect. 2.3.2. After feeding each subset into the network, the output tiles of pixels were merged into a FD scene of pixels for the whole AOI (Fig. 6a).
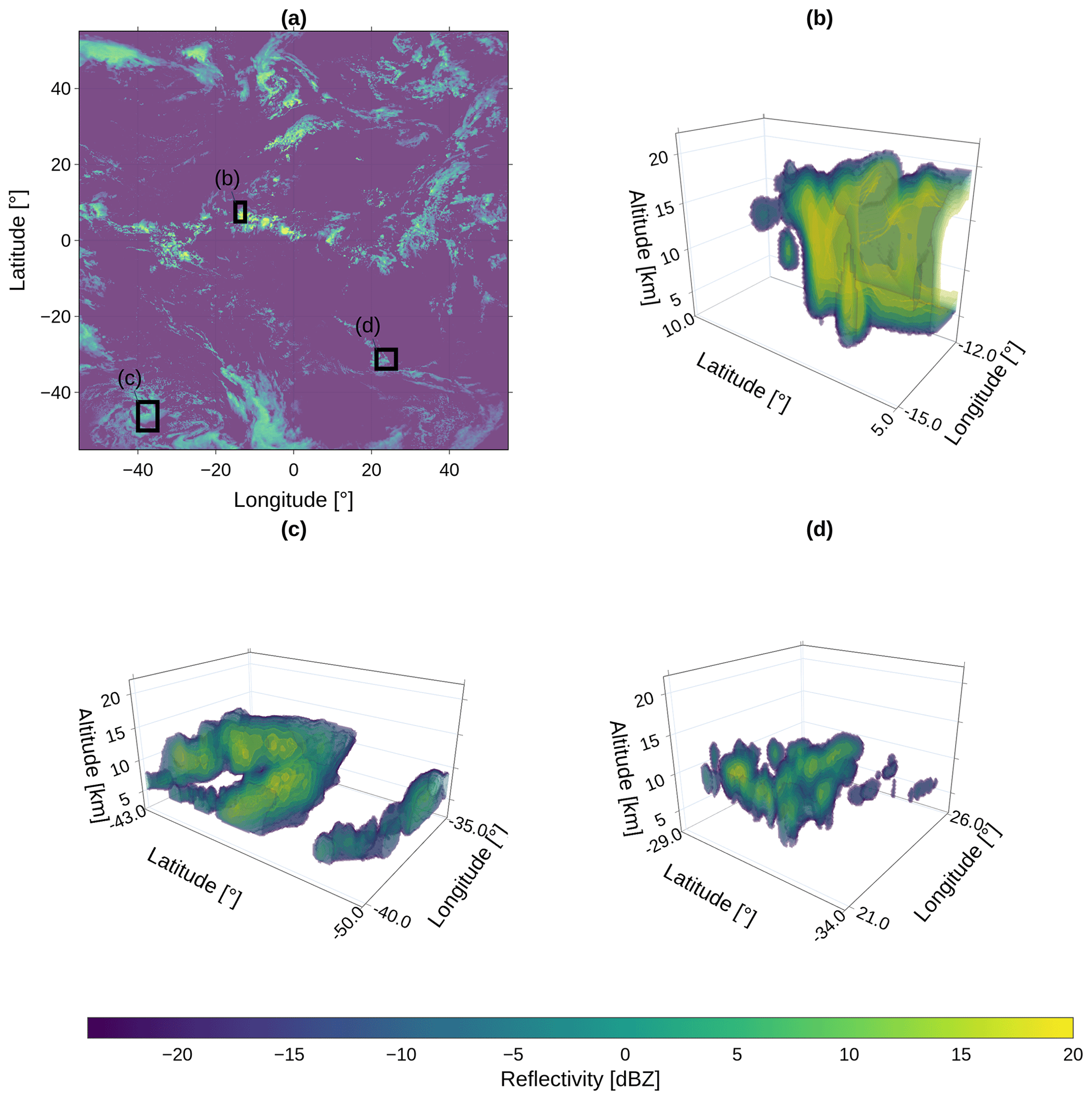
Figure 6Prediction of 3D cloud structures from the Res-UNet along the FD MSG SEVIRI domain with a top view of the maximum cloud column reflectivity for each pixel on 6 May 2016 at 13:00 UTC (a). The detailed views in panels (b–d) span several tiles of 100×100 pixels (2.5∘ on the geographic grid) to show the absence of artifacts between predictions.
The results contain a 3D cloud field along 90 height bins between 2.4 and 24 km. As shown in Fig. 6a, the top view of the maximum reflectivity per cloud column demonstrates the absence of hard borders between single prediction tiles. Even though CloudSat data are only available at the radar transects, we can extrapolate smooth cloud structures on the FD. The example tiles (b)–(d) show a fluid transition between the edges of single prediction tiles (Fig. 6). Each example spans a horizontal extent of (100×100 pixels) to demonstrate the absence of artifacts between the tiles. High-reaching convective complexes (b) and large-scale structures (c, d) are extrapolated at the FD scale regardless of their location. Even though the overall reflectivity is underestimated, low-level and multi-layer clouds are displayed as contiguous entities.
We visualize the mean RMSE between 60∘ N and 60∘ S to investigate zonal variations for the test dataset. The geographic analysis is used to evaluate the reliability of the 3D cloud tomography. The RMSE shows a high-latitudinal variability. At 30–50∘ N, we observe the highest RMSEs of 6–7 dBZ (Fig. 7a). The RMSE at mid latitudes in the Southern Hemisphere is lower than in the Northern Hemisphere. Nevertheless, the lowest RMSE is achieved in the tropics between 20∘ N and 20∘ S. We analyze the RMSE in relation to the number of image–profile pairs originating in the matching scheme in Sect. 2.1.3. Most image–profile pairs are located around the Equator and at the mid latitudes (Fig. 7b). Few pairs are matched around 10∘ N and 30∘ S. Regions at the mid latitudes have the highest RMSE and the highest number of observations. In the tropics, the RMSE is lower. Here, we obtain a high number of image–profile pairs from the matching scheme. The predicted cloud field shows high geographic variability of the RMSE. We observe a higher RMSE for the Northern Hemisphere than for the Southern Hemisphere. Clouds in the subtropics are more accurately represented than clouds at high latitudes. At the same time, we lack observations here. The analysis emphasizes the importance of the geographic location for the model predictions as well as the influence of the CloudSat orbit.
3.4 Comparison of the predicted CTH
To evaluate the quality of the Res-UNet predictions, we compare the reflectivity distribution between CloudSat and the Res-UNet predictions. In a second step, we calculate the CTH on the test dataset. The reflectivities in Fig. 8a are provided on a logarithmic scale due to the high proportion of cloud-free pixels around −25 dBZ (Fig. 8a and c). Values dBZ are visualized with a grey background. They lie below the threshold used to determine a cloud signal for the calculation of the CTH (Sect. 2.3.3). The distribution of CloudSat and predicted reflectivities is similar for up to −10 dBZ. For higher reflectivities, the distributions diverge. As demonstrated in Fig. 2, the network fails to accurately reconstruct high reflectivities. The difference increases for reflectivities >0 dBZ. Both reflectivity distributions are dominated by cloud-free pixels of −25 dBZ (Fig. 8c). The comparison shows the importance of the background value for the whole distribution. For values dBZ, the difference between the distributions decreases. The shift of the distribution is reflected in the CTH in Fig. 8b. Both datasets display a maximum CTH at 7 km height. This first peak is overestimated by the model. A second peak around 12–15 km height is underestimated by the Res-UNet. The difference between the predicted CTH is reflected within Fig. 8d. The mismatch between the two peaks is about the same size. The underestimated second peak can be traced back to the inaccuracy of the predicted reflectivities. The Res-UNet overestimates reflectivities dBZ at all height levels up to 15 km. It misses high reflectivities responsible for the peak of the CTH at 12–15 km (Fig. 3b). Instead, we see an overall surplus of background values in the FD prediction.
Calculating the CTH on the FD predictions substantially increases the number of available data points compared to the CloudSat data. Predicted images surpass the radar observations by a factor of 10 000. We use the 3D cloud tomography to derive the FD CTH on the test dataset. For each time step, we calculate the CTH on the FD and aggregate the results to a monthly mean. These values are compared to the CLAAS-V002E1 product with a resolution of 0.05∘ (Finkensieper et al., 2020). The predicted CTH has a resolution of 0.03∘. Due to this mismatch, our predictions show more fragmented structures (Sect. 2.3.3). CloudSat faces sensor limitations at low and high altitudes of the troposphere (Sect. 2.1.2). While our analysis reveals an overall high agreement, the lack of, e.g., thin clouds within the radar data can lead to a reduced similarity between the CLAAS-V002E1 data and the predicted CTH. We observe a connection between the similarity of the datasets and the hemisphere. In the Northern Hemisphere, the highest number of image–profile pairs and the highest CTH difference occur between 0 and 20∘ N. Between the tropics of the Southern Hemisphere, the number of observations is similar, whereas the CTH difference is considerably lower. The variability between the hemispheres can be traced back to the distribution of land masses. A higher proportion of oceans in the Southern Hemisphere and a modified solar zenith angle affect the formation of clouds (Bruno et al., 2021). The result is an increased model performance which might be caused by the existence of either more uniform or less complex clouds.
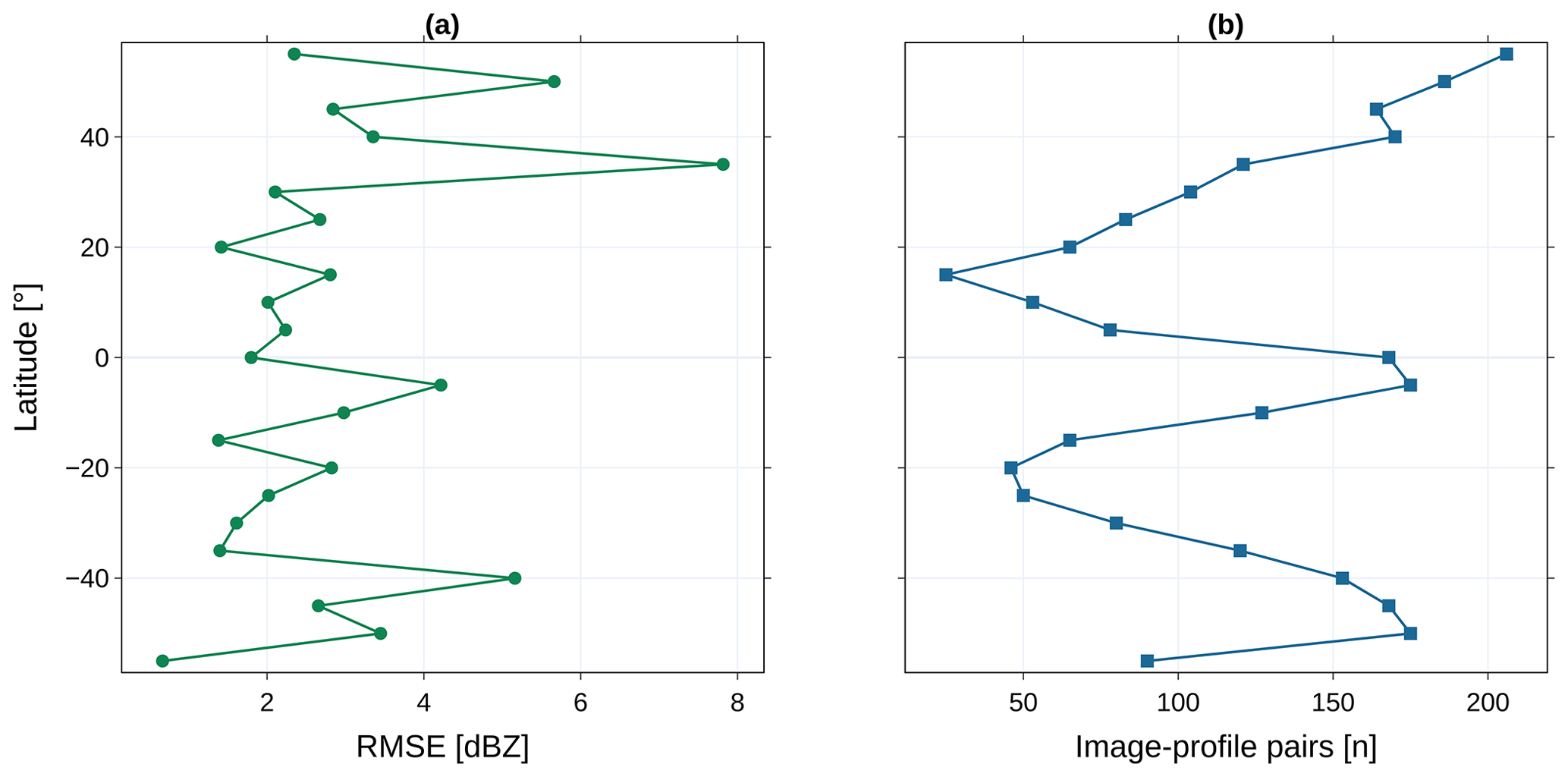
Figure 7Zonal RMSE of the Res-UNet (a) and number of matched image–profile pairs used for model evaluation (b) for latitudes between 60∘ N and 60∘ S (n=1500).
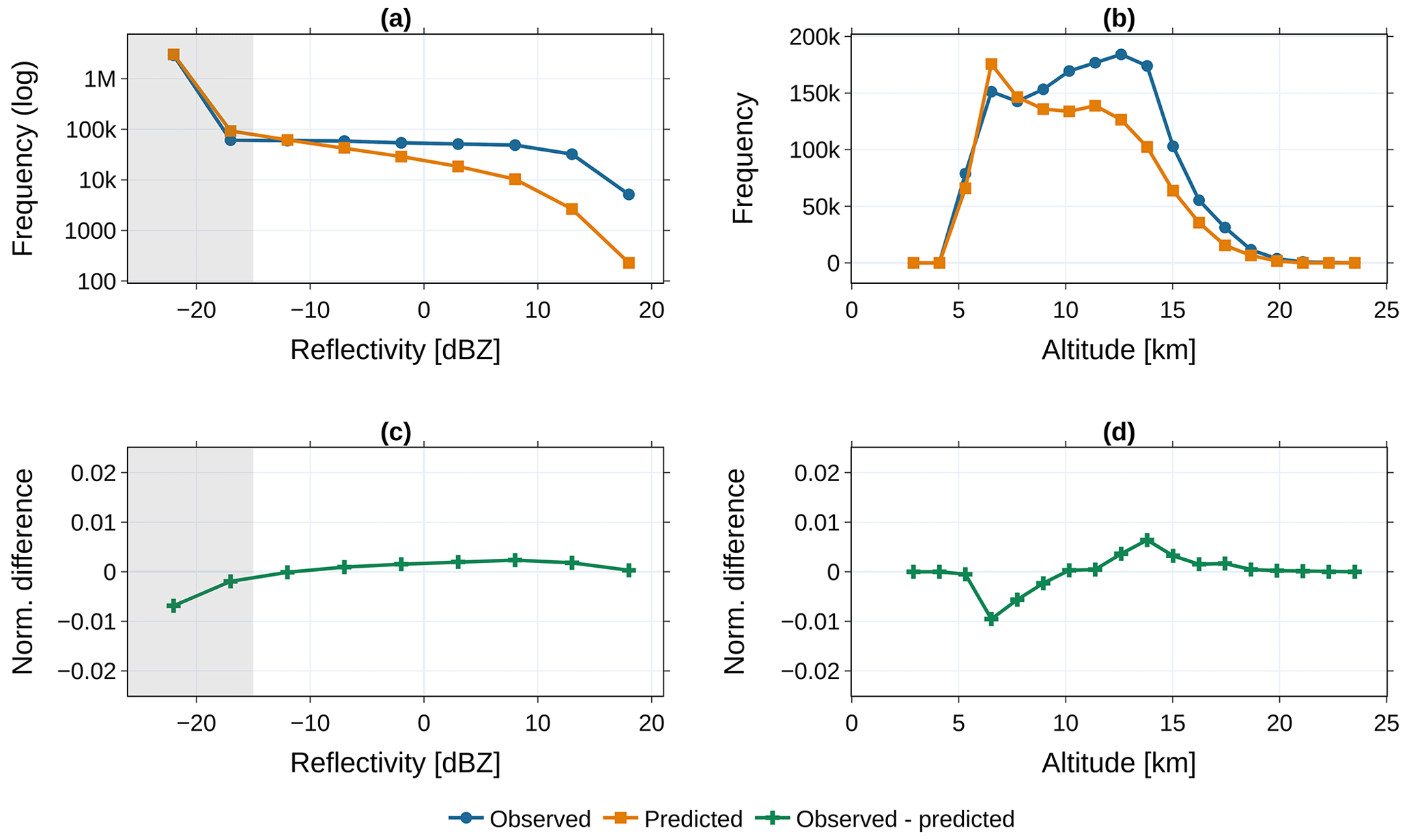
Figure 8Comparing the reflectivity distribution and the derived CTH for CloudSat and the Res-UNet predictions. Data are calculated on the test dataset and aggregated to a monthly mean (n=1500). The upper-row frequencies (a) and (b) display the dBZ and computed CTH for observed and predicted data. Lower-row images (c) and (d) show the difference between the observed and predicted data. Grey areas in plots (a) and (c) contain reflectivities below the threshold of −15 dBZ applied for the CTH analysis.
Although the small-scale accuracy of the predicted CTH is improvable, the results allow an investigation of regional differences on the large scale. These differences arise especially around the Equator and at mid to high latitudes (Fig. 9). At mid latitudes, the CTH over water bodies is overestimated in the Southern Hemisphere and underestimated in the Northern Hemisphere. These differences can be traced back to an increased RMSE in these regions (Fig. 7). In contrast, a low RMSE in the subtropics increases the accuracy of the predicted CTH. The model is biased toward predicting lower clouds than the observational data. Overall, the Res-UNet overestimates the occurrence of clouds in 6–8 km while underestimating high clouds (Fig. 8b).
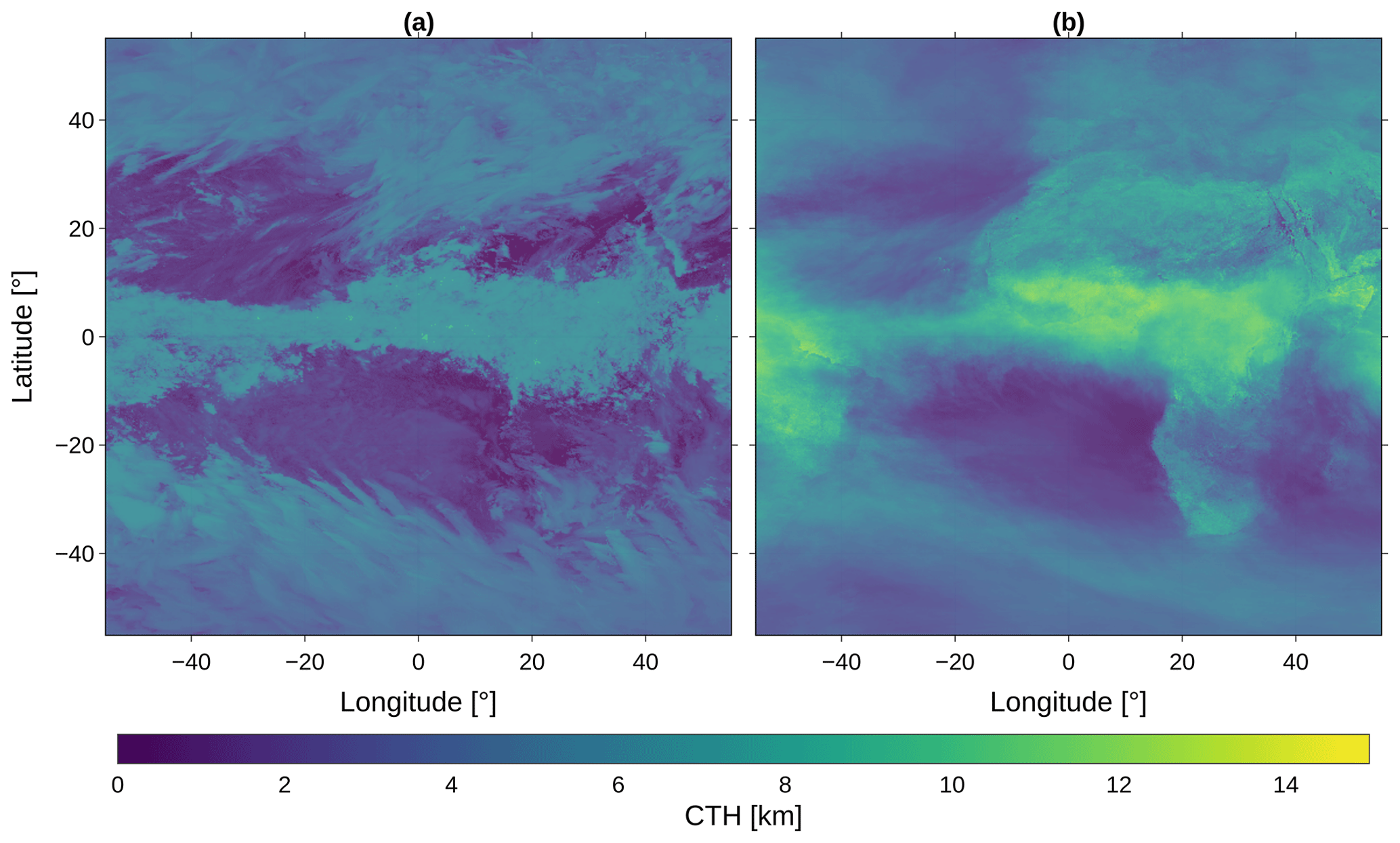
Figure 9Monthly aggregation for the derived CTH for May 2016 (a) compared to CLAAS-V002E1 CTO (b).
This issue is reflected within Fig. 10. Here, we visualize the geographic distribution of the CTH difference (Fig. 10a). The mean difference over all the pixels accounts for 1.28 km. While the data show an overall agreement, the pixel-wise difference rises to a maximum of 10 km. This applies especially to regions in the subtropics. We observe an underestimation of the predicted CTH over land. Above the Atlantic Ocean, especially in the tropics, the predictions are too high. The highest difference occurs in the subtropics in the Northern Hemisphere (Fig. 10b). At 20∘ N, the mean difference accounts for 5 km. Around the tropics and mid latitudes, both datasets are in higher agreement. The distribution of the CTH difference is inversely proportional to the number of matched image–profile pairs (Fig. 7b). The CTH difference decreases with an increasing number of observational data from CloudSat. This applies to predictions over land and sea. Since we lack ground truth in the subtropics, the performance of the predictions decreases. The geographical differences are only partly in accordance with the distribution of the RMSE (Fig. 7a). While the RMSE is lower in the northern subtropics, the error of the predicted CTH reaches its peak (Fig. 10b). The RMSE alone does not appear to be a suitable measure for defining the reliability of the predicted reflectivity on the FD. This is due to the influence of the skewed reflectivity distribution on the RMSE and its geographic variability.
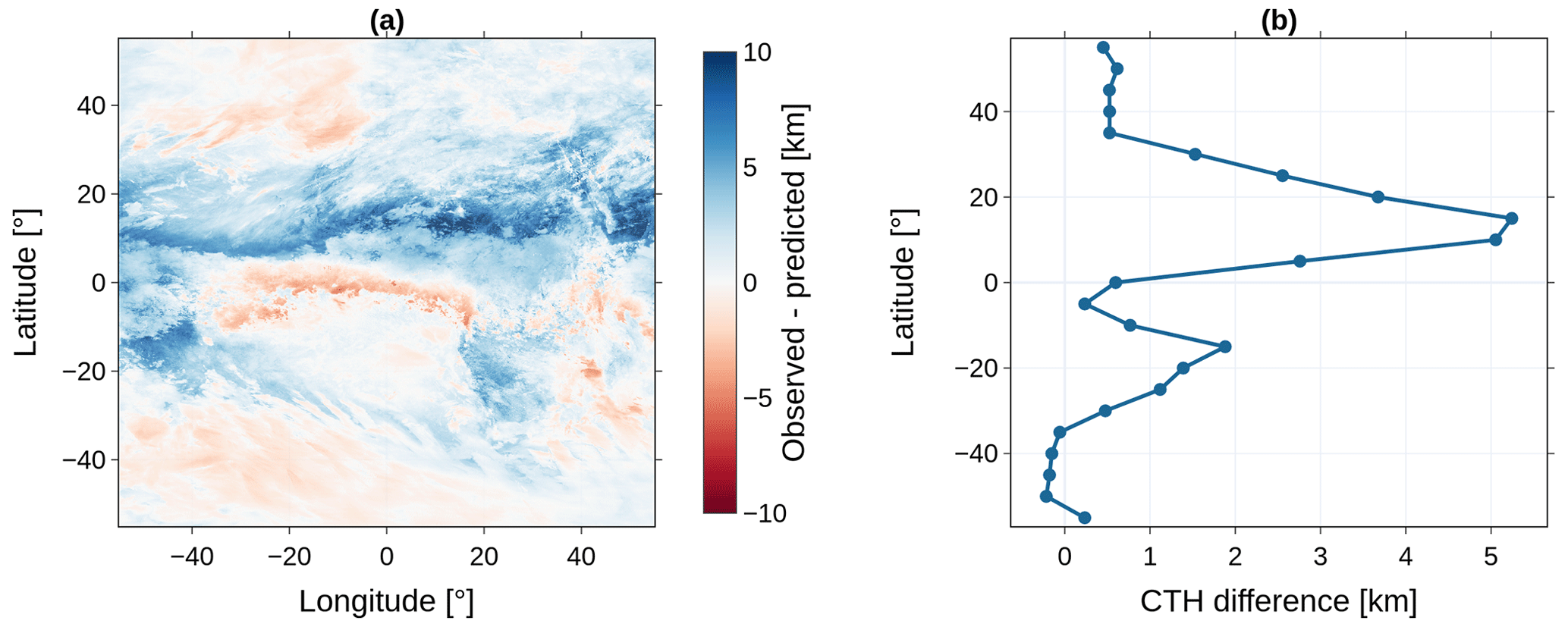
Figure 10Difference between CLAAS-V002E1 CTO and the computed CTH for May 2016. Panel (a) shows the geographic distribution on the FD, panel (b) the zonal error.
Even though the comparison of the CTH shows regional differences, the predictions can be used to represent the CTH pattern on the FD. The CLAAS-V002E1 data are computed using the MSG SEVIRI imager data as well as derived products and additional data. Each of them brings its own bias, potentially multiplying their effects on the final CTH. In contrast, our CTH is only based on the predicted reflectivity. In that way, we can minimize the influence of additional data sources.
The Res-UNet makes predictions based on the MSG SEVIRI channels, preserving the spatial details and global context during training (Wang et al., 2022). The error of the model varies depending on cloud structure within the radar cross section. Compared to pixel-based approaches like OLS, the Res-UNet better reconstructs the pixel connectivity. The OLS and RF operate on 1D cloud columns. This limits their ability to extrapolate cloud information to a larger scale, resulting in fragmented reconstructions (Fig. 5c and d). While the RMSE and the reflectivity distribution are similar across all the models, only the Res-UNet predicts a contiguous radar cross section. Choosing a DL framework eliminates the need for prior predictor variable selection (Kühnlein et al., 2014; Leinonen et al., 2019). This can reduce the user bias in the input data (Jeppesen et al., 2019; Jiao et al., 2020).
The Res-UNet shows a 30 % improvement in the mean RMSE (Fig. 4). We could potentially further enhance the model performance by utilizing a more complex architecture. Our input data differ from typical grey-scale or RGB images, as they comprise multiple input channels and result in 3D output (Drönner et al., 2018). Given the demands of our data and resource constraints, we adapted a standard UNet architecture rather than using a pre-trained model (Amato et al., 2020). Selecting the RMSE as a loss function can increase the blurriness in the results, particularly as model bias grows (Mathieu et al., 2016). This issue becomes apparent as all the models struggle to predict high reflectivities (Fig. 2b–d). The predictions are influenced by an imbalance within the CloudSat data, with the distribution of all the models skewed toward low reflectivities. A resolution mismatch between CloudSat and MSG SEVIRI exacerbates this imbalance, causing peak reflectivities to blur out (Fig. 5b–d).
Our study covers a large-scale AOI spanning 60∘ in all directions. In contrast to the studies of Leinonen et al. (2019) or Hilburn et al. (2020), we incorporate a diverse landscape into our training. While Hilburn et al. (2020) focused on radar signal reconstruction over the USA using land-based radar, Leinonen et al. (2019) concentrated on radar cross-sectional prediction over the sea. In our study, we match image–profile pairs over land and the sea to achieve model invariance in the topography. The performance of our Res-UNet is similar to their results. Nevertheless, we observe regional difference, especially for the CTH. We use a geographical analysis to highlight the importance of the topography and land–sea distribution and their impact on cloud microphysics (Wang et al., 2023).
We emphasize the influence of the geographic location and the CloudSat orbit, particularly in regions farther from the Equator, where sensor accuracy diminishes (Fig. 7). Currently, we estimate the model error to be mainly influenced by the data imbalance and chosen loss function. In the future, addressing the cloud parallax shift in high-angle satellite observations could enhance the results by a more accurate image–profile matching (Bieliński, 2020). The most accurate predictions fall between 25∘ N and 25∘ S (Fig. 7), while mid and high latitudes exhibit a higher RMSE. This is likely due to the land–sea distribution and connected cloud patterns. Over ocean bodies, the model overestimates the reflectivity (Fig. 10a). Using the water vapor channels could lead to this distortion. Improved predictions are evident over the Southern Hemisphere. Since CloudSat operates in a sun-synchronous orbit, it misses diurnal variations in each region (Sect. 2.1.2). In this study, we only derive daytime predictions. This is due to the influence of solar radiation in VIS channels (Hilburn et al., 2020; Jeppesen et al., 2019). Additional distortions may arise from VIS channels, as imager data only represent the uppermost cloud layer. Depending on the location, they can be highly influenced by the surface albedo (Drönner et al., 2018). Training a model without the VIS channels can help to achieve predictions independent of the daytime. Reducing the extent of the AOI can mitigate the geographic performance differences but limits the applicability of the network. Training regional models and adjusting the loss function and model architectures offer potential solutions to improve the results of the 3D cloud tomography.
The reconstructed CloudSat cross sections are comparable to results achieved by Leinonen et al. (2019). For both studies, the RMSE varies between 0 and 1 dBZ for cloud-free samples, between 3 and 7 dBZ for more uniform clouds, and by more than 10 dBZ for multi-layer clouds. A common limitation is accurately representing multi-layer clouds. Using the satellite channels to derive this information may be limited (Schmetz et al., 2002; Thies and Bendix, 2011). High reflectivities tend to be underestimated due to noise near the ground (Stephens et al., 2008). To mitigate this, we exclude affected height levels, but this results in incomplete model predictions between 0 and 5 km (Fig. 2). Reducing noise is crucial for improving the performance of DL applications in remote sensing (Enitan and Ilesanmi, 2021). Our results are significantly influenced by the resolution difference between CloudSat and MSG SEVIRI as well as the choice of the loss function (Sect. 2.1.3). The aggregation of CloudSat pixels blurs the contrast within individual clouds (Fig. 5a), which is further reflected in the increased RMSE. In contrast, Leinonen et al. (2019) use data from the MODIS satellite. It has a higher spatial resolution than the MSG SEVIRI data, allowing for sharper predictions along the radar transect. However, polar-orbiting satellites like MODIS lack the spatiotemporal coverage of geostationary satellites (Dubovik et al., 2021). In their study, Wang et al. (2023) derive 24 000 training samples for matching CloudSat and MODIS over 6 years. By using MSG SEVIRI data, we amplify the volume of the training data. We have extracted approximately 30 000 training samples from 1 year of imager data, which results in a ratio of about 1:7.
Currently, a compromise on the resolution is necessary to obtain predictions for Europe and Africa. However, promising new instruments are emerging. While data from comparable sources like the GOES-R series and the Himawari 8/9 satellites already offer a 1 km resolution, the recently launched Meteosat Third Generation satellite by EUMETSAT allows us to close the gap and enables a more precise representation of individual clouds (Holmlund et al., 2021). Although our approach currently focuses on a region centered around 0∘ longitude, we can apply the same framework to other geostationary satellites, potentially achieving global 3D cloud coverage throughout the troposphere. The predicted cloud field can be valuable for time series analysis, enabling the tracking of clouds in four dimensions across space and time. Our results facilitate the identification of large-scale cloud patterns. They offer various applications, such as analyzing cloud organizational structures, pinpointing lightning locations, or conducting precipitation onset analyses. While we use CloudSat radar data as our ground truth, we need to evaluate whether this approach can be adapted to other 2D transect data sources, such as aerosol measurements. Former studies already derived aerosol properties from imager data (Carrer et al., 2010). The DL framework could help to achieve a full 3D retrieval of aerosols.
With the help of a neural network, we demonstrate for the first time the potential to infer comprehensive 3D radar reflectivities from 2D geostationary satellite images. While former studies were confined to a smaller region or the reconstruction of the 2D radar transect, we provide a framework to model the 3D cloud field at a high spatiotemporal resolution. The study is focused on Africa and Europe, but the approach can be used to predict the radar reflectivity on a global scale. Using only the predicted reflectivity, we derive the CTH without external data sources. Overall, the approach accurately reconstructs cloud structures under varying environmental conditions on the FD. Although the results are affected by sensor-specific and technical limitations, a vast potential for applications in atmospheric and climate sciences is apparent. With steadily growing data and the emergence of improved instruments, the results can close the existing global data gap. We emphasize the benefit of extrapolating a 3D cloud field, especially in remote oceanic regions. Future work will focus on extending the proposed network by data with an enhanced spatial and temporal resolution and investigating 3D cloud processes in active applications.
Table A1Hyperparameters and training parameters of the Res-UNet.

The source code for the imager data-matching scheme and the model framework is available at https://doi.org/10.5281/zenodo.8238110 (Brüning, 2023). The Meteosat SEVIRI level 1.5 data used in this study have been downloaded from the EUMETSAT Data Centre at https://navigator.eumetsat.int (last access: 27 July 2023; Schmetz et al., 2002). The level 2B-GEOPROF CloudSat data used in this study have been downloaded from the CloudSat Data Processing Center at https://www.cloudsat.cira.colostate.edu/ (last access: 27 July 2023, Marchand et al., 2008).
SB and HT designed the study. SB and SN developed the model code. SB performed the modeling and visualization. SB and HT contributed to the model validation and analysis of cloud properties. SB and HT wrote the draft of the paper. All the authors have read and agreed to the published version of the manuscript.
The contact author has declared that none of the authors has any competing interests.
Publisher's note: Copernicus Publications remains neutral with regard to jurisdictional claims made in the text, published maps, institutional affiliations, or any other geographical representation in this paper. While Copernicus Publications makes every effort to include appropriate place names, the final responsibility lies with the authors.
We acknowledge the infrastructure provided by the Max Planck Graduate Center Mainz. We acknowledge EUMETSAT for providing access to the Meteosat SEVIRI imager data. We acknowledge the Cooperative Institute for Research in the Atmosphere, CSU, for providing access to the CloudSat GEOPROF-2B data. We acknowledge CM SAF for providing access to the CLAAS-2.1 data. We thank Peter Spichtinger for useful discussions and comments on the manuscript.
This research has been supported by the Carl Zeiss Foundation (grant no. P2018-02-003).
This open-access publication was funded by Johannes Gutenberg University Mainz.
This paper was edited by Cuiqi Zhang and reviewed by three anonymous referees.
Amato, F., Guignard, F., Robert, S., and Kanevski, M.: A novel framework for spatio-temporal prediction of environmental data using deep learning, Sci. Rep.-UK, 10, 22243, https://doi.org/10.1038/s41598-020-79148-7, 2020. a, b, c
Barker, H. W., Jerg, M. P., Wehr, T., Kato, S., Donovan, D. P., and Hogan, R. J.: A 3D cloud-construction algorithm for the EarthCARE satellite mission, Q. J. Roy. Meteor. Soc., 137, 1042–1058, https://doi.org/10.1002/qj.824, 2011. a, b
Bedka, K., Brunner, J., Dworak, R., Feltz, W., Otkin, J., and Greenwald, T.: Objective Satellite-Based Detection of Overshooting Tops Using Infrared Window Channel Brightness Temperature Gradients, J. Appl. Meteorol. Clim., 49, 181–202, https://doi.org/10.1175/2009JAMC2286.1, 2010. a
Benas, N., Finkensieper, S., Stengel, M., van Zadelhoff, G.-J., Hanschmann, T., Hollmann, R., and Meirink, J. F.: The MSG-SEVIRI-based cloud property data record CLAAS-2, Earth Syst. Sci. Data, 9, 415–434, https://doi.org/10.5194/essd-9-415-2017, 2017. a
Bieliński, T.: A Parallax Shift Effect Correction Based on Cloud Height for Geostationary Satellites and Radar Observations, Remote Sens.-UK, 12, 365, https://doi.org/10.3390/rs12030365, 2020. a
Bocquet, M., Elbern, H., Eskes, H., Hirtl, M., Žabkar, R., Carmichael, G. R., Flemming, J., Inness, A., Pagowski, M., Pérez Camaño, J. L., Saide, P. E., San Jose, R., Sofiev, M., Vira, J., Baklanov, A., Carnevale, C., Grell, G., and Seigneur, C.: Data assimilation in atmospheric chemistry models: current status and future prospects for coupled chemistry meteorology models, Atmos. Chem. Phys., 15, 5325–5358, https://doi.org/10.5194/acp-15-5325-2015, 2015. a
Bony, S., Stevens, B., Frierson, D. M. W., Jakob, C., Kageyama, M., Pincus, R., Shepherd, T. G., Sherwood, S. C., Siebesma, A. P., Sobel, A. H., Watanabe, M., and Webb, M. J.: Clouds, circulation and climate sensitivity, Nat. Geosci., 8, 261–268, https://doi.org/10.1038/ngeo2398, 2015. a
Boulesteix, A.-L., Janitza, S., Kruppa, J., and König, I. R.: Overview of random forest methodology and practical guidance with emphasis on computational biology and bioinformatics, WIREs Data Min. Knowl., 2, 493–507, https://doi.org/10.1002/widm.1072, 2012. a
Breiman, L.: Random Forests, Mach. Learn., 45, 5–32, https://doi.org/10.1023/A:1010933404324, 2001. a
Brüning, S.: AI-derived 3D cloud tomography, Zenodo [code], https://doi.org/10.5281/zenodo.8238110, 2023. a
Bruno, O., Hoose, C., Storelvmo, T., Coopman, Q., and Stengel, M.: Exploring the Cloud Top Phase Partitioning in Different Cloud Types Using Active and Passive Satellite Sensors, Geophys. Res. Lett., 48, e2020GL089863, https://doi.org/10.1029/2020GL089863, 2021. a
Cao, K. and Zhang, X.: An Improved Res-UNet Model for Tree Species Classification Using Airborne High-Resolution Images, Remote Sens.-UK, 12, 1228, https://doi.org/10.3390/rs12071128, 2020. a
Carrer, D., Roujean, J.-L., Hautecoeur, O., and Elias, T.: Daily estimates of aerosol optical thickness over land surface based on a directional and temporal analysis of SEVIRI MSG visible observations, J. Geophys. Res.-Atmos., 115, D10, https://doi.org/10.1029/2009JD012272, 2010. a
Chen, Y., Chen, G., Cui, C., Zhang, A., Wan, R., Zhou, S., Wang, D., and Fu, Y.: Retrieval of the vertical evolution of the cloud effective radius from the Chinese FY-4 (Feng Yun 4) next-generation geostationary satellites, Atmos. Chem. Phys., 20, 1131–1145, https://doi.org/10.5194/acp-20-1131-2020, 2020. a
Cintineo, J. L., Pavolonis, M. J., Sieglaff, J. M., Wimmers, A., Brunner, J., and Bellon, W.: A Deep-Learning Model for Automated Detection of Intense Midlatitude Convection Using Geostationary Satellite Images, Weather Forecast., 35, 2567–2588, https://doi.org/10.1175/WAF-D-20-0028.1, 2020. a
CloudSat Data Processing Center: Level 2B GEOPROF, Data Products, CloudSat DPC, https://www.cloudsat.cira.colostate.edu/data-products/2b-geoprof (last access: 27 July 2023), 2023. a
Denby, L.: Discovering the Importance of Mesoscale Cloud Organization Through Unsupervised Classification, Geophys. Res. Lett., 47, e2019GL085190, https://doi.org/10.1029/2019GL085190, 2020. a
Diakogiannis, F. I., Waldner, F., Caccetta, P., and Wu, C.: ResUNet-a: A deep learning framework for semantic segmentation of remotely sensed data, ISPRS J. Photogramm., 162, 94–114, https://doi.org/10.1016/j.isprsjprs.2020.01.013, 2020. a, b, c
Dixit, M., Chaurasia, K., and Kumar Mishra, V.: Dilated-ResUnet: A novel deep learning architecture for building extraction from medium resolution multi-spectral satellite imagery, Expert Syst. Appl., 184, 115530, https://doi.org/10.1016/j.eswa.2021.115530, 2021. a
Drönner, J., Korfhage, N., Egli, S., Mühling, M., Thies, B., Bendix, J., Freisleben, B., and Seeger, B.: Fast Cloud Segmentation Using Convolutional Neural Networks, Remote Sens.-UK, 10, 1782, https://doi.org/10.3390/rs10111782, 2018. a, b, c, d, e
Dubovik, O., Schuster, G., Xu, F., Hu, Y., Bösch, H., Landgraf, J., and Li, Z.: Grand Challenges in Satellite Remote Sensing, Front. Remote Sens., 2, 619818, https://doi.org/10.3389/frsen.2021.619818, 2021. a, b
Enitan, I. and Ilesanmi, T.: Methods for image denoising using convolutional neural network: a review, Complex & Intelligent Systems, 7, 2189–2198, https://doi.org/10.1007/s40747-021-00428-4, 2021. a
EUMETSAT Data Services: High Rate SEVIRI Level 1.5 Image Data – MSG – 0 degree, available at https://navigator.eumetsat.int/product/EO:EUM:DAT:MSG:HRSEVIRI (last access: 27 July 2023), 2023. a
Finkensieper, S., Meirink, J. F., van Zadelhoff, G.-J., Hanschmann, T., Benas, N., Stengel, M., Fuchs, P., Hollmann, R., Kaiser, J., and Werscheck, M.: CLAAS-2.1: CM SAF CLoud property dAtAset using SEVIRI – Edition 2.1, EUMESTST [data set], https://doi.org/10.5676/EUM_SAF_CM/CLAAS/V002_01, 2020. a, b
Forster, L., Davis, A. B., Diner, D. J., and Mayer, B.: Toward Cloud Tomography from Space Using MISR and MODIS: Locating the “Veiled Core” in Opaque Convective Clouds, J. Atmos. Sci., 78, 155–166, https://doi.org/10.1175/JAS-D-19-0262.1, 2021. a
Guillaume, A., Kahn, B. H., Yue, Q., Fetzer, E. J., Wong, S., Manipon, G. J., Hua, H., and Wilson, B. D.: Horizontal and Vertical Scaling of Cloud Geometry Inferred from CloudSat Data, J. Atmos. Sci., 75, 2187–2197, https://doi.org/10.1175/JAS-D-17-0111.1, 2018. a
Ham, S.-H., Kato, S., Barker, H. W., Rose, F. G., and Sun-Mack, S.: Improving the modelling of short-wave radiation through the use of a 3D scene construction algorithm, Q. J. Roy. Meteor. Soc., 141, 1870–1883, https://doi.org/10.1002/qj.2491, 2015. a
Han, L., Liang, H., Chen, H., Zhang, W., and Ge, Y.: Convective Precipitation Nowcasting Using U-Net Model, IEEE T. Geosci. Remote, 60, 1–8, https://doi.org/10.1109/TGRS.2021.3100847, 2022. a
Henken, C. C., Schmeits, M. J., Deneke, H., and Roebeling, R. A.: Using MSG-SEVIRI Cloud Physical Properties and Weather Radar Observations for the Detection of Cb/TCu Clouds, J. Appl. Meteorol. Clim., 50, 1587–1600, https://doi.org/10.1175/2011JAMC2601.1, 2011. a
Hilburn, K. A., Ebert-Uphoff, I., and Miller, S. D.: Development and Interpretation of a Neural-Network-Based Synthetic Radar Reflectivity Estimator Using GOES-R Satellite Observations, J. Appl. Meteorol. Clim., 60, 3–21, https://doi.org/10.1175/JAMC-D-20-0084.1, 2020. a, b, c, d, e, f, g, h
Holmlund, K., Grandell, J., Schmetz, J., Stuhlmann, R., Bojkov, B., Munro, R., Lekouara, M., Coppens, D., Viticchie, B., August, T., Theodore, B., Watts, P., Dobber, M., Fowler, G., Bojinski, S., Schmid, A., Salonen, K., Tjemkes, S., Aminou, D., and Blythe, P.: Meteosat Third Generation (MTG): Continuation and Innovation of Observations from Geostationary Orbit, B. Am. Meteorol. Soc., 102, 990–1015, https://doi.org/10.1175/BAMS-D-19-0304.1, 2021. a
Hu, K., Zhang, D., and Xia, M.: CDUNet: Cloud Detection UNet for Remote Sensing Imagery, Remote Sens.-UK, 13, 4533, https://doi.org/10.3390/rs13224533, 2021. a, b
Huo, J., Lu, D., Duan, S., Bi, Y., and Liu, B.: Comparison of the cloud top heights retrieved from MODIS and AHI satellite data with ground-based Ka-band radar, Atmos. Meas. Tech., 13, 1–11, https://doi.org/10.5194/amt-13-1-2020, 2020. a
Irrgang, C., Boers, N., Sonnewald, M., Barnes, E. A., Kadow, C., Staneva, J., and Saynisch-Wagner, J.: Towards neural Earth system modelling by integrating artificial intelligence in Earth system science, Nat. Mach. Intell., 3, 667–674, https://doi.org/10.1038/s42256-021-00374-3, 2021. a
Jeppesen, J. H., Jacobsen, R. H., Inceoglu, F., and Toftegaard, T. S.: A cloud detection algorithm for satellite imagery based on deep learning, Remote Sens. Environ., 229, 247–259, https://doi.org/10.1016/j.rse.2019.03.039, 2019. a, b, c, d, e, f, g, h, i, j
Jiao, L., Huo, L., Hu, C., and Tang, P.: Refined UNet: UNet-Based Refinement Network for Cloud and Shadow Precise Segmentation, Remote Sens.-UK, 12, 2001, https://doi.org/10.3390/rs12122001, 2020. a, b, c
Jones, N.: How machine learning could help to improve climate forecasts, Nature, 548, 379–379, https://doi.org/10.1038/548379a, 2017. a
Jordahl, K., Bossche, J. V. D., Fleischmann, M., Wasserman, J., McBride, J., Gerard, J., Tratner, J., Perry, M., Badaracco, A. D., Cochran, M., Gillies, S., Culbertson, L., Bartos, M., Eubank, N., Maxalbert, Bilogour, A., Rey, S., Ren, C., Arribas-Bel, D., Wasser, L., Wolf, L. J., Journois, M., Wilson, J., Greenhall, A., Holdgraf, C., Filipe, and Leblanc, F.: geopandas/geopandas: v0.8.1, Zenodo [code], https://doi.org/10.5281/ZENODO.3946761, 2020. a
Karpatne, A., Ebert-Uphoff, I., Ravela, S., Babaie, H. A., and Kumar, V.: Machine Learning for the Geosciences: Challenges and Opportunities, IEEE T. Knowl. Data En., 31, 1544–1554, https://doi.org/10.1109/TKDE.2018.2861006, 2019. a
Kingma, D. P. and Ba, J.: Adam: A Method for Stochastic Optimization, arXiv [preprint], https://doi.org/10.48550/arXiv.1412.6980, 2014. a
Kühnlein, M., Appelhans, T., Thies, B., and Nauss, T.: Improving the accuracy of rainfall rates from optical satellite sensors with machine learning – A random forests-based approach applied to MSG SEVIRI, Remote Sens. Environ., 141, 129–143, https://doi.org/10.1016/j.rse.2013.10.026, 2014. a
Le Goff, M., Tourneret, J.-Y., Wendt, H., Ortner, M., and Spigai, M.: Deep learning for cloud detection, in: 8th International Conference of Pattern Recognition Systems (ICPRS 2017), 1–6, https://doi.org/10.1049/cp.2017.0139, Madrid, Spain, 11–13 July 2017, 2017. a, b
Lee, Y., Kummerow, C. D., and Ebert-Uphoff, I.: Applying machine learning methods to detect convection using Geostationary Operational Environmental Satellite-16 (GOES-16) advanced baseline imager (ABI) data, Atmos. Meas. Tech., 14, 2699–2716, https://doi.org/10.5194/amt-14-2699-2021, 2021. a, b, c, d, e
Leinonen, J., Guillaume, A., and Yuan, T.: Reconstruction of Cloud Vertical Structure With a Generative Adversarial Network, Geophys. Res. Lett., 46, 7035–7044, https://doi.org/10.1029/2019GL082532, 2019. a, b, c, d, e, f, g, h, i
Li, R., Liu, W., Yang, L., Sun, S., Hu, W., Zhang, F., and Li, W.: DeepUNet: A Deep Fully Convolutional Network for Pixel-Level Sea-Land Segmentation, IEEE J. Sel. Top. Appl., 11, 3954–3962, https://doi.org/10.1109/JSTARS.2018.2833382, 2018. a
Liu, Y., Racah, E., Prabhat, M., Correa, J., Khosrowshahi, A., Lavers, D., Kunkel, K., Wehner, M., and Collins, W.: Application of Deep Convolutional Neural Networks for Detecting Extreme Weather in Climate Datasets, arXiv [preprint], https://doi.org/10.48550/arXiv.1605.01156, 2016. a
Marais, W. J., Holz, R. E., Reid, J. S., and Willett, R. M.: Leveraging spatial textures, through machine learning, to identify aerosols and distinct cloud types from multispectral observations, Atmos. Meas. Tech., 13, 5459–5480, https://doi.org/10.5194/amt-13-5459-2020, 2020. a, b, c
Marchand, R., Mace, G. G., Ackerman, T., and Stephens, G.: Hydrometeor Detection Using Cloudsat–An Earth-Orbiting 94 GHz Cloud Radar, J. Atmos. Ocean. Tech., 25, 519–533, https://doi.org/10.1175/2007JTECHA1006.1, 2008. a, b, c, d
Mathieu, M., Couprie, C., and LeCun, Y.: Deep multi-scale video prediction beyond mean square error, arXiv [preprint], https://doi.org/10.48550/arXiv.1511.05440, 2016. a
McCandless, T. and Jiménez, P. A.: Examining the Potential of a Random Forest Derived Cloud Mask from GOES-R Satellites to Improve Solar Irradiance Forecasting, Energies, 13, 1671, https://doi.org/10.3390/en13071671, 2020. a
Miller, S. D., Forsythe, J. M., Partain, P. T., Haynes, J. M., Bankert, R. L., Sengupta, M., Mitrescu, C., Hawkins, J. D., and Haar, T. H. V.: Estimating Three-Dimensional Cloud Structure via Statistically Blended Satellite Observations, J. Appl. Meteorol. Clim., 53, 437–455, https://doi.org/10.1175/JAMC-D-13-070.1, 2014. a
Noh, Y.-J., Haynes, J. M., Miller, S. D., Seaman, C. J., Heidinger, A. K., Weinrich, J., Kulie, M. S., Niznik, M., and Daub, B. J.: A Framework for Satellite-Based 3D Cloud Data: An Overview of the VIIRS Cloud Base Height Retrieval and User Engagement for Aviation Applications, Remote Sens.-UK, 14, 5524, https://doi.org/10.3390/rs14215524, 2022. a, b, c
Norris, J. R., Allen, R. J., Evan, A. T., Zelinka, M. D., O'Dell, C. W., and Klein, S. A.: Evidence for climate change in the satellite cloud record, Nature, 536, 72–75, https://doi.org/10.1038/nature18273, 2016. a
Pan, X., Lu, Y., Zhao, K., Huang, H., Wang, M., and Chen, H.: Improving Nowcasting of Convective Development by Incorporating Polarimetric Radar Variables Into a Deep-Learning Model, Geophys. Res. Lett., 48, e2021GL095302, https://doi.org/10.1029/2021GL095302, 2021. a
Platnick, S., Meyer, K. G., King, M. D., Wind, G., Amarasinghe, N., Marchant, B., Arnold, G. T., Zhang, Z., Hubanks, P. A., Holz, R. E., Yang, P., Ridgway, W. L., and Riedi, J.: The MODIS Cloud Optical and Microphysical Products: Collection 6 Updates and Examples From Terra and Aqua, IEEE T. Geosci. Remote, 55, 502–525, https://doi.org/10.1109/TGRS.2016.2610522, 2017. a
Rasp, S., Pritchard, M. S., and Gentine, P.: Deep learning to represent sub-grid processes in climate models, P. Natl. Acad. Sci. USA, 115, 9684–9689, https://doi.org/10.1073/pnas.1810286115, 2018. a, b
Reichstein, M., Camps-Valls, G., Stevens, B., Jung, M., Denzler, J., Carvalhais, N., and Prabhat: Deep learning and process understanding for data-driven Earth system science, Nature, 566, 195–204, https://doi.org/10.1038/s41586-019-0912-1, 2019. a
Rolnick, D., Donti, P. L., Kaack, L. H., Kochanski, K., Lacoste, A., Sankaran, K., Ross, A. S., Milojevic-Dupont, N., Jaques, N., Waldman-Brown, A., Luccioni, A. S., Maharaj, T., Sherwin, E. D., Mukkavilli, S. K., Kording, K. P., Gomes, C. P., Ng, A. Y., Hassabis, D., Platt, J. C., Creutzig, F., Chayes, J., and Bengio, Y.: Tackling Climate Change with Machine Learning, ACM Comput. Surv., 55, 1–96, https://doi.org/10.1145/3485128, 2022. a
Ronneberger, O., Fischer, P., and Brox, T.: U-Net: Convolutional Networks for Biomedical Image Segmentation., in: Medical Image Computing and Computer-Assisted Intervention – MICCAI 2015, edited by: Navab, N., Hornegger, J., Wells, W. M., and Frangi, A. F., Springer International Publishing, Cham, 234–241, https://doi.org/10.1007/978-3-319-24574-4_28, 2015. a, b
Runge, J., Bathiany, S., Bollt, E., Camps-Valls, G., Coumou, D., Deyle, E., Glymour, C., Kretschmer, M., Mahecha, M. D., Muñoz-Marí, J., van Nes, E. H., Peters, J., Quax, R., Reichstein, M., Scheffer, M., Schölkopf, B., Spirtes, P., Sugihara, G., Sun, J., Zhang, K., and Zscheischler, J.: Inferring causation from time series in Earth system sciences, Nat. Commun., 10, 2553, https://doi.org/10.1038/s41467-019-10105-3, 2019. a
Schmetz, J., Pili, P., Tjemkes, S., Just, D., Kerkmann, J., Rota, S., and Ratier, A.: An Introduction to Meteosat Second Generation (MSG), B. Am. Meteorol. Soc., 83, 977–992, https://doi.org/10.1175/1520-0477(2002)083<0977:AITMSG>2.3.CO;2, 2002. a, b, c, d
Seiz, G. and Davies, R.: Reconstruction of cloud geometry from multi-view satellite images, Remote Sens. Environ., 100, 143–149, https://doi.org/10.1016/j.rse.2005.09.016, 2006. a
Shepherd, T. G.: Atmospheric circulation as a source of uncertainty in climate change projections, Nat. Geosci., 7, 703–708, https://doi.org/10.1038/ngeo2253, 2014. a
Sieglaff, J., Hartung, D., Feltz, W., Cronce, L., and Lakshmanan, V.: A Satellite-Based Convective Cloud Object Tracking and Multipurpose Data Fusion Tool with Application to Developing Convection, J. Atmos. Ocean. Tech., 30, 510–525, https://doi.org/10.1175/JTECH-D-12-00114.1, 2013. a
Steiner, M., Houze, R. A., and Yuter, S. E.: Climatological Characterization of Three-Dimensional Storm Structure from Operational Radar and Rain Gauge Data, J. Appl. Meteorol. Clim., 34, 1978–2007, https://doi.org/10.1175/1520-0450(1995)034<1978:CCOTDS>2.0.CO;2, 1995. a, b
Stephens, G. L., Vane, D. G., Tanelli, S., Im, E., Durden, S., Rokey, M., Reinke, D., Partain, P., Mace, G. G., Austin, R., L'Ecuyer, T., Haynes, J., Lebsock, M., Suzuki, K., Waliser, D., Wu, D., Kay, J., Gettelman, A., Wang, Z., and Marchand, R.: CloudSat mission: Performance and early science after the first year of operation, J. Geophys. Res.-Atmos., 113, D8, https://doi.org/10.1029/2008JD009982, 2008. a, b, c, d, e
Stevens, B. and Bony, S.: What Are Climate Models Missing?, Science, 340, 1053–1054, https://doi.org/10.1126/science.1237554, 2013. a
Tarrio, K., Tang, X., Masek, J. G., Claverie, M., Ju, J., Qiu, S., Zhu, Z., and Woodcock, C. E.: Comparison of cloud detection algorithms for Sentinel-2 imagery, Science of Remote Sens., 2, 100010, https://doi.org/10.1016/j.srs.2020.100010, 2020. a
Thies, B. and Bendix, J.: Satellite based remote sensing of weather and climate: recent achievements and future perspectives, Meteorol. Appl., 18, 262–295, https://doi.org/10.1002/met.288, 2011. a, b
Troyanskaya, O., Cantor, M., Sherlock, G., Brown, P., Hastie, T., Tibshirani, R., Botstein, D., and Altman, R. B.: Missing value estimation methods for DNA microarrays, Bioinformatics, 17, 520–525, https://doi.org/10.1093/bioinformatics/17.6.520, 2001. a
Vial, J., Dufresne, J.-L., and Bony, S.: On the interpretation of inter-model spread in CMIP5 climate sensitivity estimates, Clim. Dynam., 41, 3339–3362, https://doi.org/10.1007/s00382-013-1725-9, 2013. a
Wang, F., Liu, Y., Zhou, Y., Sun, R., Duan, J., Li, Y., Ding, Q., and Wang, H.: Retrieving Vertical Cloud Radar Reflectivity from MODIS Cloud Products with CGAN: An Evaluation for Different Cloud Types and Latitudes, Remote Sens.-UK, 15, 816, https://doi.org/10.3390/rs15030816, 2023. a, b, c, d, e, f, g, h
Wang, S., Chen, W., Xie, S. M., Azzari, G., and Lobell, D. B.: Weakly Supervised Deep Learning for Segmentation of Remote Sensing Imagery, Remote Sens.-UK, 12, 207, https://doi.org/10.3390/rs12020207, 2020. a
Wang, Z., Zhao, J., Zhang, R., Li, Z., Lin, Q., and Wang, X.: UATNet: U-Shape Attention-Based Transformer Net for Meteorological Satellite Cloud Recognition, Remote Sens.-UK, 14, 104, https://doi.org/10.3390/rs14010104, 2022. a
Wieland, M., Li, Y., and Martinis, S.: Multi-sensor cloud and cloud shadow segmentation with a convolutional neural network, Remote Sens. Environ., 230, 111203, https://doi.org/10.1016/j.rse.2019.05.022, 2019. a
Zantedeschi, V., Falasca, F., Douglas, A., Strange, R., Kusner, M. J., and Watson-Parris, D.: Cumulo: A Dataset for Learning Cloud Classes, arXiv [preprint], https://doi.org/10.48550/arXiv.1911.04227, 2022. a
Zhang, D., He, Y., Li, X., Zhang, L., and Xu, N.: PrecipGradeNet: A New Paradigm and Model for Precipitation Retrieval with Grading of Precipitation Intensity, Remote Sens.-UK, 15, 227, https://doi.org/10.3390/rs15010227, 2023. a, b
Zhang, Z., Ackerman, A. S., Feingold, G., Platnick, S., Pincus, R., and Xue, H.: Effects of cloud horizontal inhomogeneity and drizzle on remote sensing of cloud droplet effective radius: Case studies based on large-eddy simulations, J. Geophys. Res.-Atmos., 117, D19, https://doi.org/10.1029/2012JD017655, 2012. a